慣性計測装置(IMU)を搭載したoToBrite自動車用VIOカメラによるロボット位置推定の強化

-
home -
ニュースとイベント
ニュースとイベント -
慣性計測装置(IMU)を搭載したoToBrite自動車用VIOカメラによるロボット位置推定の強化
慣性計測装置(IMU)を搭載したoToBrite自動車用VIOカメラによるロボット位置推定の強化
屋外用自律走行ロボット(AMR)や無人地上車両(UGV)は、自動運転トラック、歩道配送、自律運搬、自律ヤードシフティング、自律農業など、さまざまな産業を変革しています。これらの屋外プラットフォームは、動的で非構造的な環境、凹凸のある路面、そしてGPSが利用しづらい環境での運用を前提として設計されており、安全かつ効率的な自律走行を実現するために、信頼性の高い自己位置推定と動作トラッキングが求められます。
慣性計測装置(IMU)は、AMRやUGVにおける高精度な自己位置推定を実現するための重要な要素です。IMUは通常、3軸加速度センサーと3軸ジャイロスコープを中核コンポーネントとして構成され、線形加速度と角速度をリアルタイムで測定します。必要に応じて、方位推定を補助するための磁力計を搭載することも可能です。これらのセンサーが組み合わさることで、特に動的で非構造的な環境において不可欠な動作トラッキングシステムが形成されます。
IMUベースのシステムの利点を活かすことで、実際のAMR/UGVの導入において、堅牢なナビゲーション性能を維持するために克服すべき複数の自己位置推定上の課題に対応することができます。
AMR/UGVにおける自己位置推定の主な課題
1. IMUによるGPS/RTK課題の克服
屋外環境では、GPSやRTKに大きく依存する位置推定システムが、受信状態の悪い基地局、高層建築物、橋梁、反射面などによって容易に妨害される可能性があります。これらの干渉は、信号劣化、マルチパス効果、あるいは一時的な測位精度の低下を引き起こします。こうした状況において、IMUは重要な補完的役割を果たします。高頻度のモーションデータを継続的に提供することで、GNSS信号が途切れた際のギャップを埋め、安定した姿勢推定を維持します。これにより、都市部、建設現場、産業エリアといったGNSSに制約のある環境で信頼性の高い位置推定を確保するために、IMUの統合は不可欠となります。
2. IMUによる傾斜地での走行対応
従来の2D LiDARのみを使用したSLAMシステムでは、傾斜地におけるピッチの変化を検出できません。その結果、しばしば坂道を垂直な障害物として誤認し、地図が歪んだり経路計画に支障をきたすことがあります。IMUはピッチおよびロールデータを提供することで、システムが傾斜を正しく認識し、スロープや坂道においても安定したナビゲーションを維持するのに役立ちます。
3. 車両振動とIMUによる補償
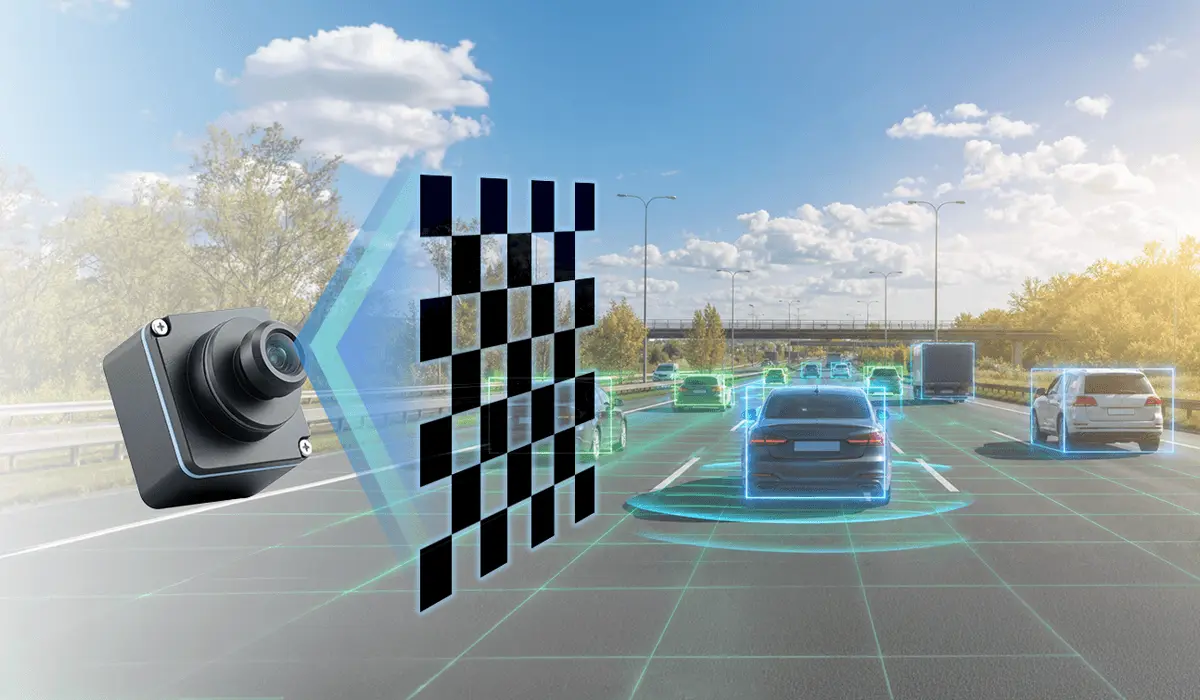
不整地や凹凸のある路面では、AMRやUGVに機械的な振動が生じ、Visual SLAMシステムの性能が大幅に低下する可能性があります。これらの振動は、カメラの急激な動きによって画像フレームが歪み、正確な特徴点マッチングや三角測量を妨げることで、Visual Odometry(VO)における深度推定エラーを引き起こします。IMUデータを統合することで、これらの歪みをリアルタイムで補償でき、動的環境下での深度推定精度を向上させることが可能となります。 oToBriteのVisual-Inertial Odometry (VIO) カメラは、この利点を明確に示しており、IMUとの融合により振動による位置推定誤差を大幅に低減し、動的環境においてもより高い信頼性を確保します。
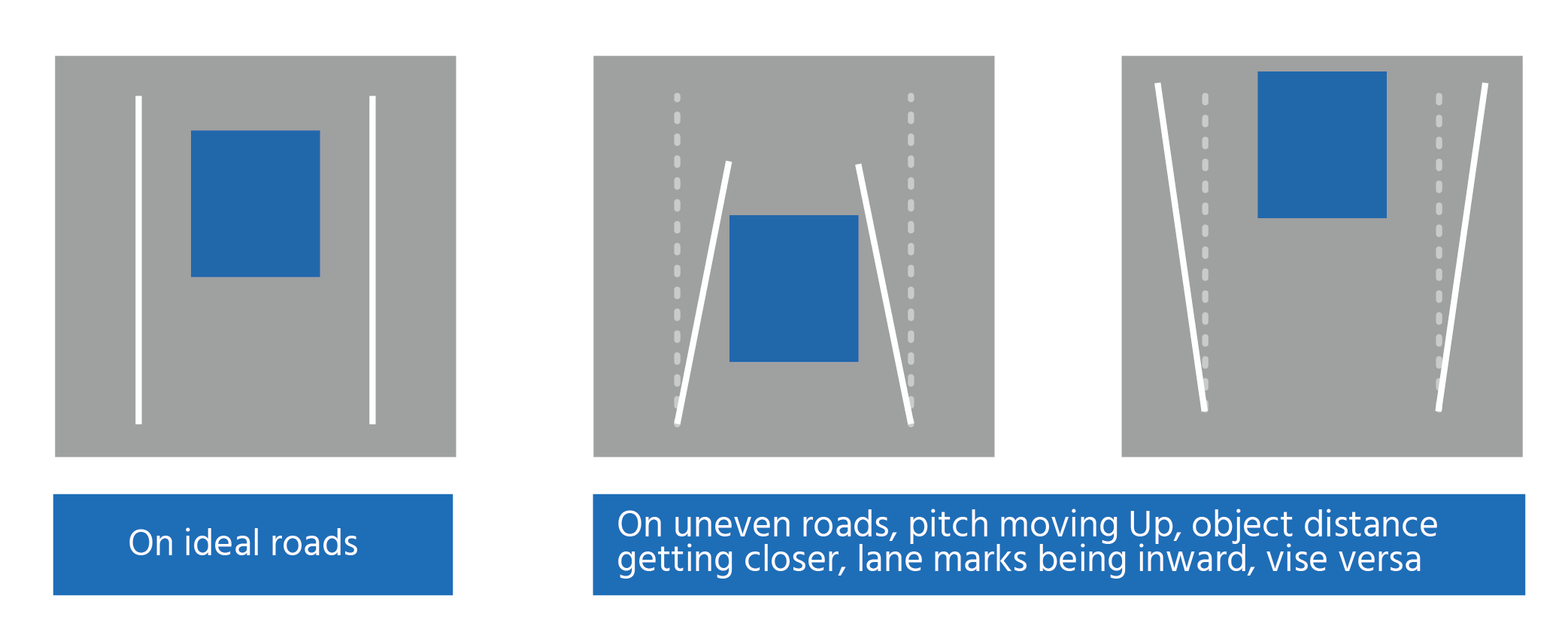
図1. ピッチはカメラによる距離推定に最も大きな影響を与える
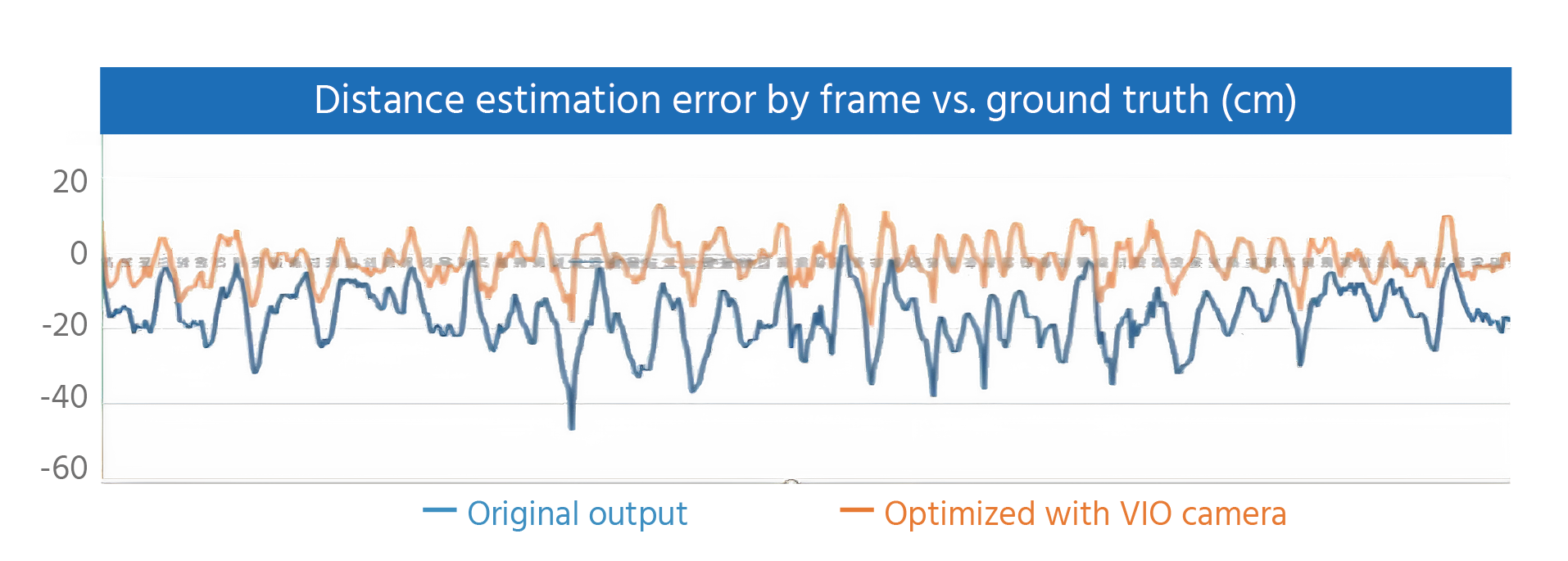
図2. フレームごとの距離推定誤差とグラウンドトゥルース値の比較
IMU使用における実務的な課題
IMUは無人車両やモバイルロボティクスにおける高精度な位置推定や動作トラッキングに不可欠ですが、実際の運用においては依然としていくつかの課題に直面します。主な制約は累積ドリフトであり、センサーのバイアスやノイズによって、IMU単独で動作する場合には時間の経過とともに位置推定誤差が拡大していきます。これを軽減するため、多くのシステムはVisual-Inertial Odometry(VIO)を導入し、視覚データと慣性データを融合させることでドリフトを補正し精度を向上させています。しかし、VIOには複雑さが伴い、カメラとIMUの厳密な時間同期が求められます。わずか1ミリ秒のずれでも、急激な動きや鋭い旋回時には大きな姿勢推定誤差につながる可能性があります。さらに、生のIMU信号には高サンプリングレート時に特に高周波ノイズが含まれることが多く、カルマンフィルタやローパスフィルタなどの手法でノイズを低減できますが、その分レイテンシが増加します。この追加処理はECUに負荷を与え、特にI²Cのような帯域幅に制約のあるシステムではリアルタイムSLAM性能を制限する要因となります。従来、IMU・カメラ・ECUは別々のコンポーネントとして異なる場所に設置されていたため、姿勢の整合やデータ同期をとることが困難でした。IMUをカメラに直接組み込み、工場で高精度キャリブレーションを行うことで、IMU計測と画像取得の時間的同期および姿勢整合が保証されます。この高い統合性により、位置推定のパイプラインは大幅に簡素化され、精度も向上します。
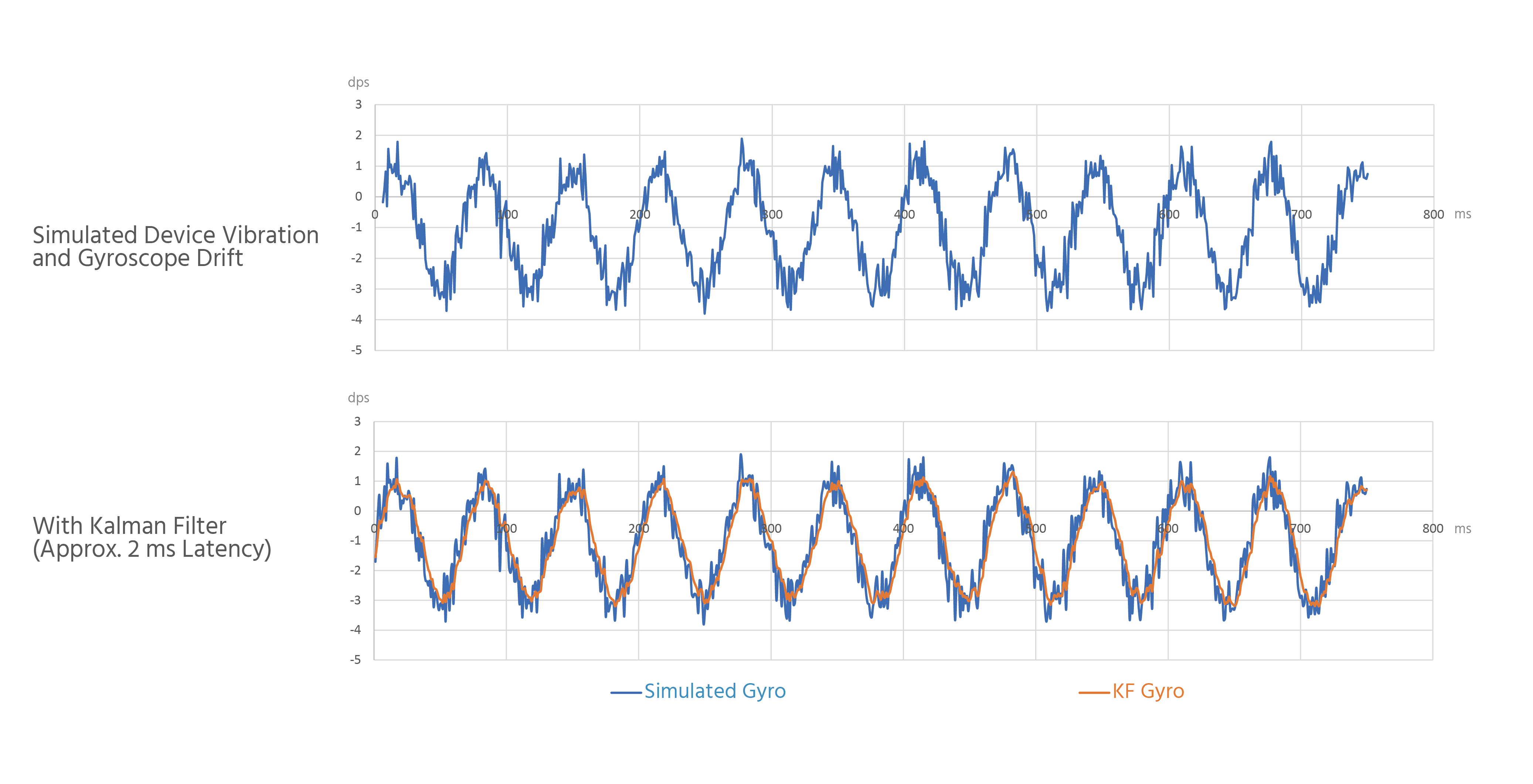
図3. カルマンフィルタを用いたジャイロスコープのノイズとドリフトの低減
oToBriteのVIOカメラ:実環境の屋外自律走行向けに設計
これらの課題に対応するため、oToBriteは屋外自律システム向けに特化したVIOカメラを開発しました。本製品はコンパクトかつ高性能で、実環境での運用要件を満たすソリューションを提供します。高感度CMOSイメージセンサー、工場出荷時に高精度キャリブレーションされたIMU(慣性計測装置)、そして専用MCUを緊密に統合することで、自動車グレードのVIOカメラはAMR、UGV、その他のロボティクスプラットフォームにおいて信頼性の高いSLAMと位置推定を実現します。
VIOカメラは高度なセンサーフュージョンを活用し、ビジュアルデータと慣性データを統合することで、振動や高速移動、照明条件の変化といった厳しい環境下でも堅牢な位置推定を可能にします。オンボードのカルマンフィルタは6軸IMUデータ(加速度計とジャイロスコープ)を処理し、動作によるアーティファクトを低減して画像安定性を向上させます。その結果、正確な姿勢推定と高精度な距離計測が実現されます。以下の主な特長は、幅広い実環境アプリケーションにおいて正確かつ信頼性の高い自己位置推定を可能にする仕組みを示しています。
図4. 信頼性の高いSLAMと位置推定を実現するCMOSセンサー、IMU、MCUを統合した車載グレードのVIOカメラ
主な特長
◆ IMUとカメラデータの同期(≤1ms)
ビジュアルデータと慣性データをミリ秒単位で正確に同期させることで、高速移動、急旋回、動的な遷移時におけるSLAMの安定性と位置推定精度を向上させます。
◆ 内蔵MCUによるEKFベースの姿勢推定
統合MCUが6軸IMUデータ(加速度計+ジャイロスコープ)を処理し、拡張カルマンフィルタ(EKF)を実行することで、中央ECUの計算負荷を軽減しながら信頼性の高いデータを提供します。
◆ コンパクトな統合ハードウェア設計
IMUとMCUをカメラモジュール内に直接組み込むことで、コンパクトかつ一体型のアーキテクチャを実現。配線の簡素化、システムの複雑さ低減、省スペース化、信頼性向上を同時に達成し、スペースに制約のある自律プラットフォームでのエッジAI展開に最適です。
◆ モジュール統合の柔軟性
IMUモジュールは柔軟にoToBriteの自動車グレードカメラシステムへ組み込み可能で、オンボードISPもサポート。SLAMやAIベースのビジョン認識アプリケーションに理想的です。
◆ 自動車グレードの信頼性
厳格な自動車規格に準拠して設計されたoToBriteのVIOカメラは、過酷な屋外環境においても長期安定稼働を実現します。屋外AMR、自律輸送車両、その他のロボティクスプラットフォームで使用する場合でも、自動車用途に匹敵する振動、極端な温度、直射日光、雨、粉塵への耐性が要求されます。
oToBriteのVIOカメラは、最先端のセンサーフュージョンと自動車グレードの信頼性を兼ね備え、AMR、UGV、その他の自律システムに対して、よりスマートで安定した自己位置推定を実現します。複雑な地形を走行する場合でも、予測不能な環境で稼働する場合でも、この革新的なソリューションは屋外自律走行における精度と堅牢性の新たな標準を打ち立てます。
詳しくはこちら:oToBrite VIOカメラ https://www.otobrite.com/ja/product/automotive-camera/isx031_gmsl2_otocam269imu-c120m
出典:
本記事はもともとEE Timesに掲載されたものです。オリジナル記事はこちらをご参照ください:https://www.eetimes.com/enhancing-robot-localization-with-otobrites-automotive-vio-camera/