利用 oToBrite 具備慣性測量單元 (IMU) 的車用 VIO 攝影機來提升機器人定位

-
首頁 -
新聞與活動
新聞與活動 -
利用 oToBrite 具備慣性測量單元 (IMU) 的車用 VIO 攝影機來提升機器人定位
利用 oToBrite 具備慣性測量單元 (IMU) 的車用 VIO 攝影機來提升機器人定位
戶外自主移動機器人(AMR)與無人地面車輛(UGV)正在改變多個產業的運作模式,例如自駕卡車、人行道配送、自主礦車、自主場內搬運以及自動化農業等。這些戶外平台被設計用於動態、非結構化、顛簸路面以及GPS訊號不穩的環境中,因此需要可靠的定位與運動追蹤能力,以確保運行的安全與效率。
慣性測量單元(IMU)是實現AMR與UGV精準定位的關鍵技術。它通常由三軸加速度計與三軸陀螺儀構成核心元件,能即時量測線性加速度與角速度;另外也可選配磁力計,用於輔助航向角估算。這些感測器共同構成運動追蹤系統中不可或缺的部分,特別是在動態與非結構化的環境中。
藉由IMU系統的優勢,實際部署於真實世界的AMR與UGV可克服多項定位挑戰,從而維持穩健的導航效能。
AMR/UGV 定位的主要挑戰
1. 以 IMU 克服 GPS/RTK 的限制
在戶外環境中,過度依賴 GPS 或 RTK 的定位系統容易受到基地台訊號不良、高樓建築、橋樑或反射面等因素的干擾,導致訊號衰減、多路徑效應或定位精度暫時下降。在這類情況下,IMU 扮演了關鍵的補償角色。透過持續、高頻率地提供運動數據,IMU 能在 GNSS 訊號中斷期間維持穩定的姿態估算。這使得 IMU 的整合成為在 GNSS 訊號不穩的環境(如都市區、工地或工業場域)中,確保可靠定位的關鍵。
2. 利用 IMU(慣性測量單元)導航坡狀地形的能力
僅依賴 2D LiDAR 的傳統 SLAM 系統無法偵測地形傾斜的俯仰變化,因此常會將斜坡誤判為垂直障礙物,導致地圖扭曲或路徑規劃受損。IMU 可提供俯仰角(pitch)與橫滾角(roll)資訊,協助系統辨識坡度變化,從而在斜坡或坡道上維持導航穩定性。
3. 車體振動與 IMU 補償
崎嶇地形或不平路面會產生機械振動,嚴重影響視覺 SLAM 系統的運作。這些振動容易導致視覺里程計(VO)中的深度估算誤差,因為快速的相機運動會造成影像幀扭曲,進而影響特徵匹配與三角測量的準確性。透過整合 IMU 數據,這些扭曲可即時補償,提升動態環境下的深度估算精度。歐特明的視覺慣性里程計(VIO)相機明確展現了此優勢——IMU 融合能顯著降低由振動引起的定位誤差,確保在動態環境中的穩定與可靠表現。
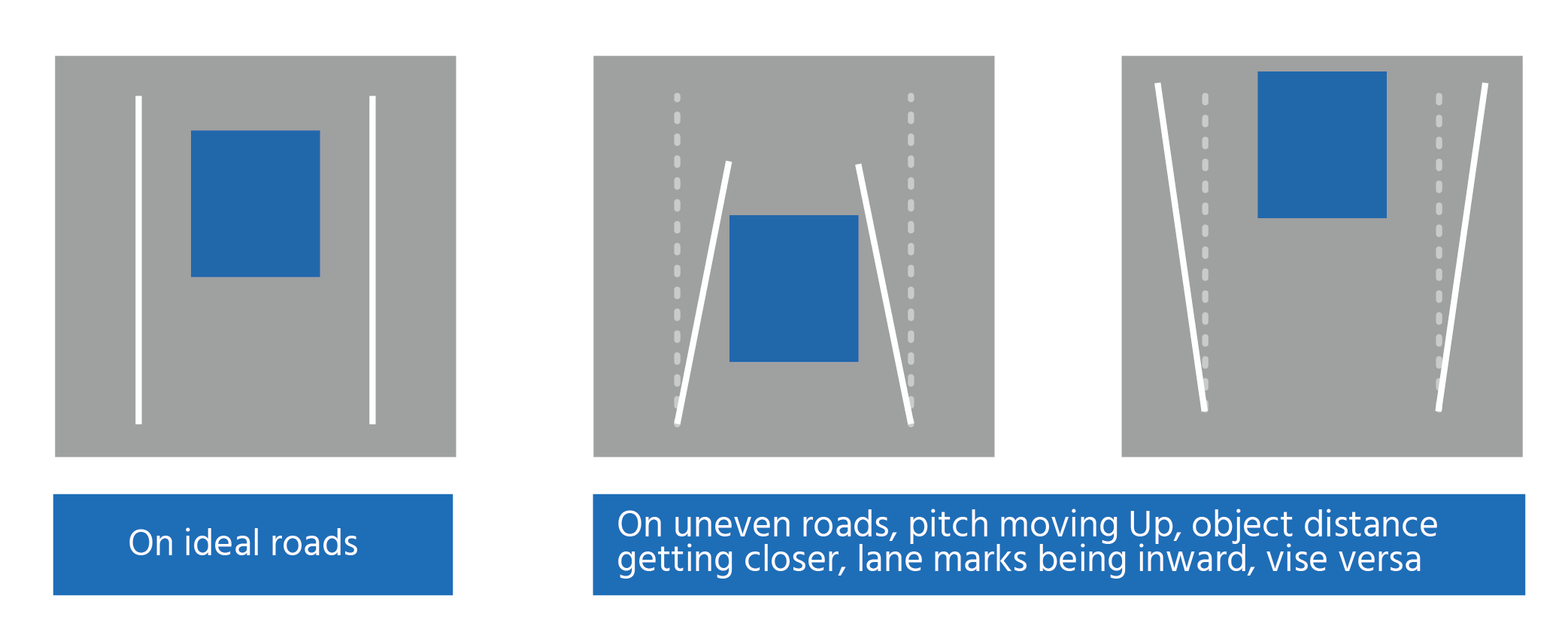
圖 1. 俯仰角對相機距離估計的影響最為嚴重
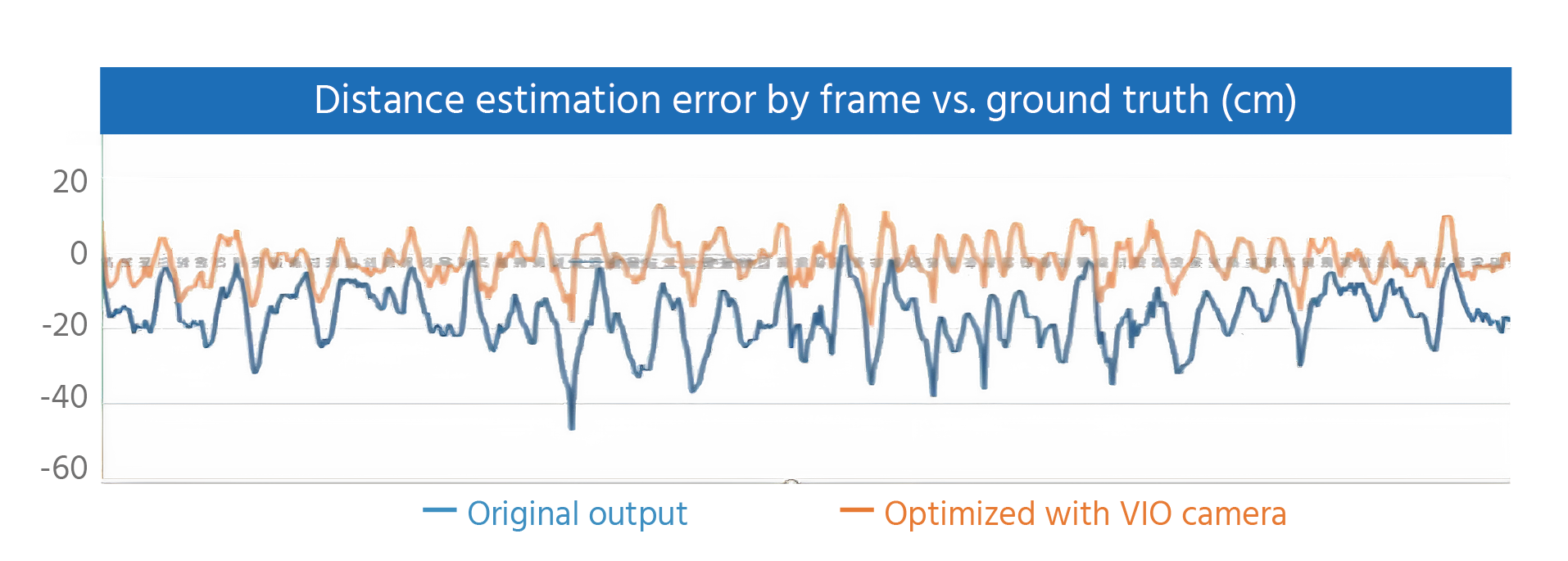
圖 2. 幀與地面實況的距離估計誤差
使用 IMU 的實際挑戰
慣性測量單元 (IMU) 對於無人駕駛車輛和移動機器人的精確定位和運動追蹤至關重要,但在實際部署中仍面臨許多挑戰。主要限制在於,當 IMU 單獨運行時,累積漂移、感測器偏差和雜訊會逐漸導致定位誤差增加。為了緩解這個問題,大多數系統會採用視覺慣性里程計 (VIO),融合視覺和慣性資料來校正漂移並提高精確度。然而,VIO 增加了複雜性,需要攝影機和 IMU 之間精確的時間同步,即使只有一毫秒的偏差也可能導致快速移動或急轉彎時出現嚴重的姿態估計誤差。此外,原始 IMU 訊號通常包含高頻噪聲,尤其是在取樣率較高的情況下。雖然卡爾曼濾波器或低通濾波器等濾波方法可以有效降低噪聲,但也會增加延遲。這種額外的處理需求會對電子控制單元 (ECU) 造成壓力,並限制即時 SLAM 效能,尤其是在 I2C 頻寬受限的系統中。過去,IMU、攝影機和 ECU 是獨立的組件,通常安裝在不同的位置,這使得它們的姿態校準和資料同步變得困難。將 IMU 直接嵌入攝影機(並經過高精度工廠校準),您可以確保 IMU 測量和影像擷取之間的時間同步和姿態校準。這種緊密整合極大地簡化了定位流程並提高了精確度。
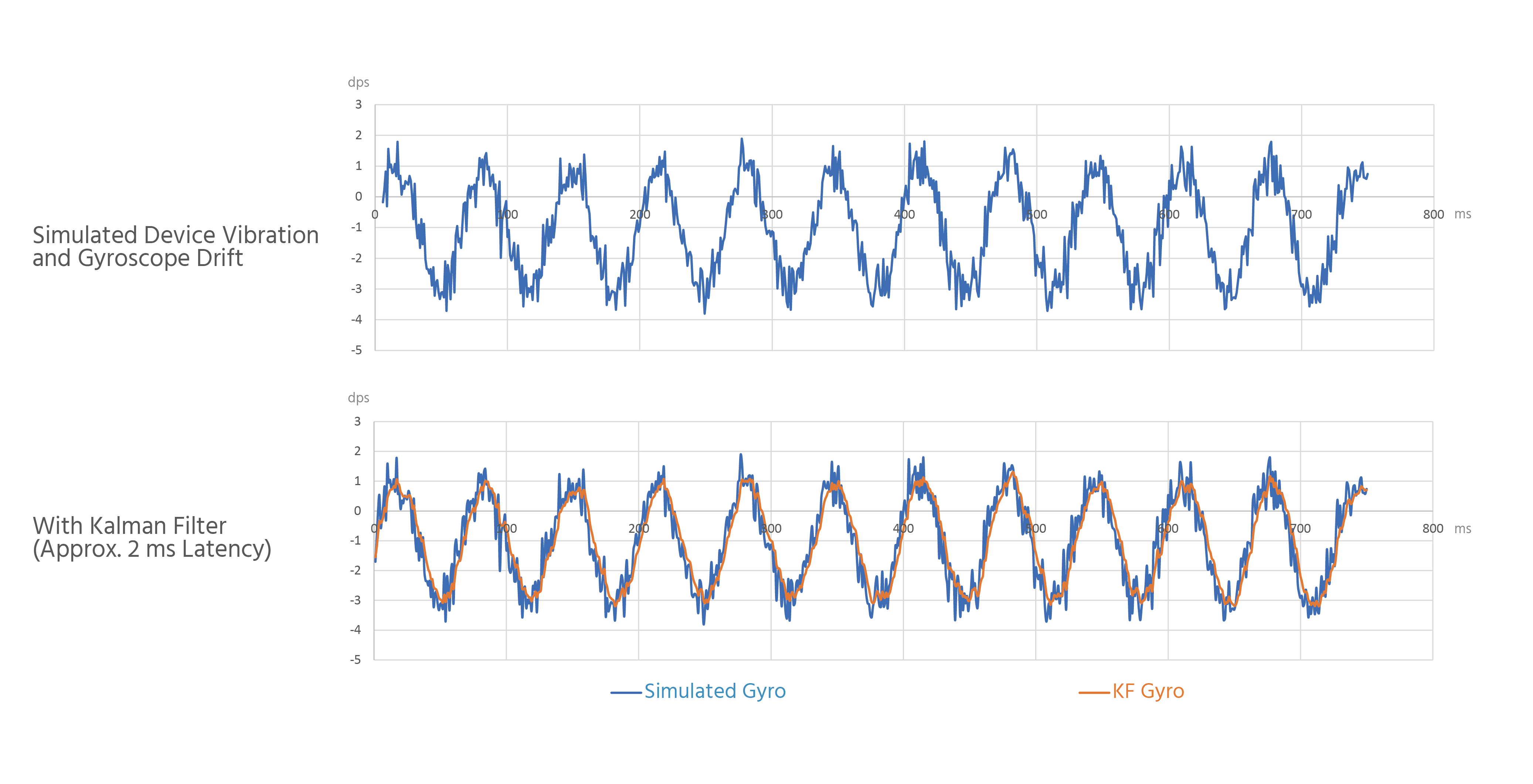
圖 3. 使用卡爾曼濾波器(Kalman Filter)降低陀螺儀雜訊與漂移
歐特明 VIO 相機:為真實戶外自主應用而設計
為了因應上述挑戰,歐特明開發了一款專為戶外自主系統打造的 VIO 相機,提供一個兼具高效能與高整合度的緊湊型解決方案,能滿足實際應用中嚴苛的部署需求。該汽車級 VIO 相機整合了高感度 CMOS 影像感測器、出廠校準的慣性測量單元(IMU)以及專用微控制器(MCU),可為 AMR、UGV 與其他機器人平台提供穩定可靠的 SLAM 與定位功能。
VIO 相機運用先進的感測融合技術(Sensor Fusion),結合視覺與慣性感測數據,即使在高振動、快速運動或光線變化劇烈的環境中,也能維持穩健的定位表現。內建的 卡爾曼濾波器(Kalman Filter) 可即時處理六軸 IMU 數據(加速度計與陀螺儀),用以抑制運動造成的影像失真並提升影像穩定度,進而實現精準的姿態估算與距離測量。
以下列出幾項關鍵特點,說明該系統如何在各類真實應用場景中實現高精度且可靠的定位能力。
圖 4. 車用級 VIO 相機:整合 CMOS 感測器、IMU 與 MCU,實現可靠的 SLAM 與定位
主要特點
◆ IMU 與相機資料同步(≤1ms)
實現視覺與慣性感測數據在毫秒級內的精準同步,即使在快速移動、急轉彎或動態變化的情況下,也能提升 SLAM 的穩定性與定位精度。
◆ 基於 EKF 的姿態估算(由內建 MCU 處理)
整合式 MCU 可即時處理六軸 IMU 數據(加速度計 + 陀螺儀),並運行擴展卡爾曼濾波器(EKF),不僅能分擔中央 ECU 的運算負載,還能提供穩定可靠的數據。
◆ 精巧且整合型的硬體設計
將 IMU 與 MCU 直接嵌入相機模組內,實現高度整合、獨立運作的架構。此設計可簡化線材佈線、降低系統複雜度、節省空間並提升可靠性,非常適合應用於空間受限的邊緣 AI 自主平台。
◆ 模組化整合設計
IMU 模組可靈活嵌入歐特明汽車級相機系統中,並支援內建 ISP 功能,非常適合應用於 SLAM 與基於 AI 的視覺感知系統。
◆ 車用級可靠性
依據嚴格的汽車標準設計,歐特明 VIO 相機在嚴苛的戶外環境中依然能長期穩定運作,具備優異的耐用性與穩定性。無論應用於戶外 AMR、自主運輸車輛或其他機器人平台,其運作條件皆與汽車應用相近,需具備抗震、耐高低溫、耐強光、耐雨水與防塵等特性。
歐特明 VIO 相機結合了先進的感測融合技術與車用級可靠性,為 AMR、UGV 及各類自主系統提供更智慧、更穩定的定位能力。無論是在複雜地形中導航,或於不可預測的環境中運作,這項創新解決方案都為戶外自主技術樹立了全新的精度與韌性標準。
了解更多歐特明 VIO 相機相關資訊: https://www.otobrite.com/zh-TW/product/automotive-camera/isx031_gmsl2_otocam269imu-c120m
原始出處:
本文最初發表於 EE Times,請參閱原文:https://www.eetimes.com/enhancing-robot-localization-with-otobrites-automotive-vio-camera/