屋外AMR および無人車両に最適な車載カメラの選び方

-
home -
ニュースとイベント
ニュースとイベント -
屋外AMR および無人車両に最適な車載カメラの選び方
屋外AMR および無人車両に最適な車載カメラの選び方
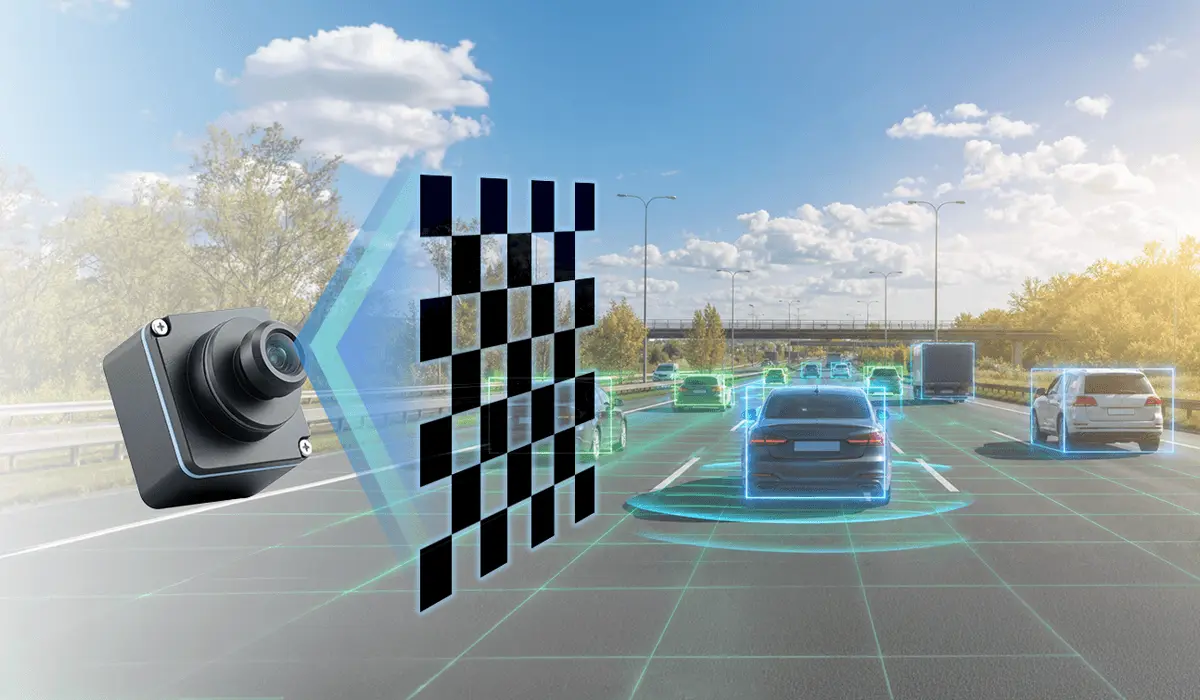
屋外の自律走行車両、例えばAMR(自律搬送ロボット)やUGV(無人地上車両)は、過酷で動的な環境下で運用されるため、安全なナビゲーションやリアルタイムの意思決定には信頼性の高いビジョンが不可欠です。適切なカメラ仕様を選ぶ際には、単に高解像度のセンサーを選ぶだけでは不十分です。インターフェース技術、環境耐性、光学品質、処理要件などを体系的に評価し、屋外自律走行に求められるパフォーマンスを満たす認識システムを構築する必要があります。
本記事では、屋外自律走行車両向けカメラを選定する際にエンジニアが考慮すべき7つの重要な要素を概説します。
1. インターフェース
カメラのインターフェースは、画像データが処理ユニットにどのように送信されるかを決定し、レイテンシ(遅延)、帯域幅、システムの堅牢性に直接影響します。屋外自律走行車両では、一般的に使用されるインターフェースとしてGMSL™とEthernetの2種類があります。
◆ GMSL™(Gigabit Multimedia Serial Link):
GMSL™は、単一の同軸ケーブルまたはシールド付きツイストペア(STP)ケーブルで最大15メートルの長距離伝送をサポートします。厳しい電磁環境に対応する設計で、強力なEMI耐性、安定したデータ伝送、超低遅延を提供し、リアルタイムの認識や障害物回避に不可欠です。さらに、GMSL™は**Power-over-Coax(PoC)**をサポートしており、配線の簡素化とシステムの複雑さの低減が可能です。
◆ Ethernet:
Ethernetは標準化されたネットワーク規格と拡張性を提供しますが、通常はレイテンシが高く、映像伝送には圧縮が必要です。そのため、リアルタイムのビジョンタスクよりも、時間制約の少ないセンサーフュージョン向きです。
屋外自律走行車両において、堅牢で低遅延のビジョンを実現するには、一般的にGMSL™が推奨されるインターフェースです。
2. 視野角(FOV)と解像度
屋外自律走行車両がどの範囲まで「見る」必要があるかは、走行速度、要求される制御・反応時間、検知すべき物体のサイズによって決まります。これらの要素が、カメラの視野角(FOV)や解像度要件を直接定義します。
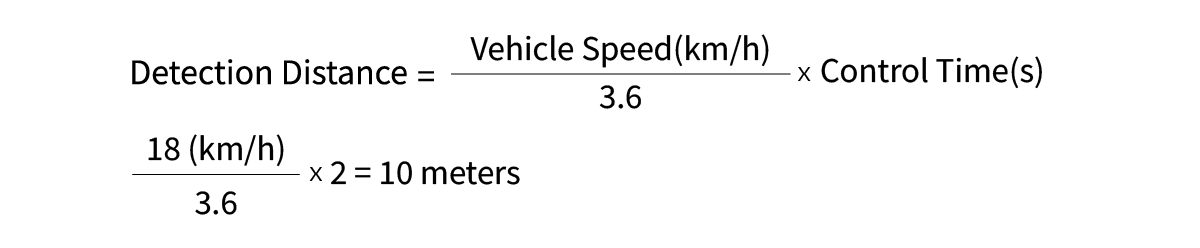
◆ 最小検知距離:
例えば、最高速度が時速18kmで、反応時間が2秒の場合、車両は少なくとも10メートル先の物体を検知できる必要があります。
◆ 視野角(FOV):
カメラから最も近い検知距離が1メートルで、その距離で必要なカバー幅が10メートルの場合、水平視野角(FOV)は次のように計算できます:
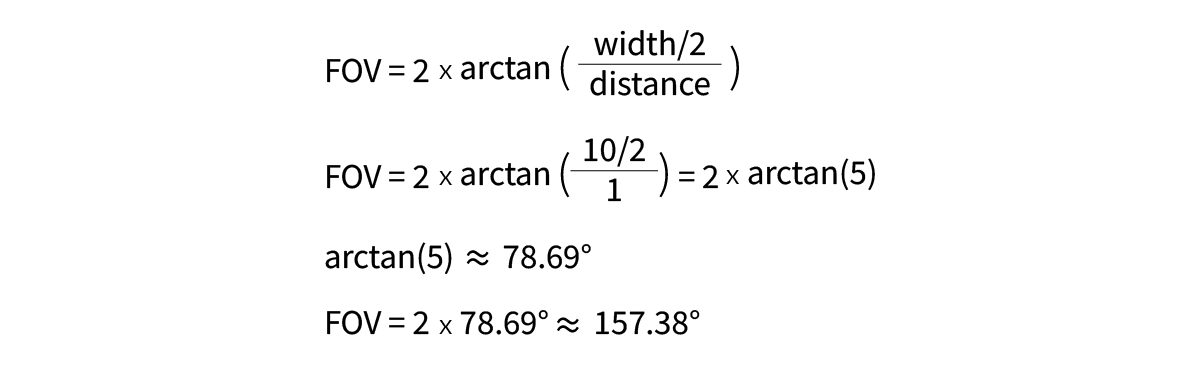
したがって、カメラは1メートルの距離で10メートル幅の領域を撮影するために、少なくとも**水平視野角157.4°**を備えている必要があります。
◆ 解像度:
最小検知距離(10メートル先)でのFOVに基づくと、検知幅(Dw)は100メートルとなります。ここで、幅1メートルの物体(Ow)を画像センサー上で最低20ピクセルで検知する必要がある場合、画像全体で必要な水平ピクセル数は次の式で計算できます:

カメラが16:9のアスペクト比のイメージセンサーを使用する場合:
この例では、検知要件を満たすために少なくとも2.25メガピクセルのカメラが必要となります。

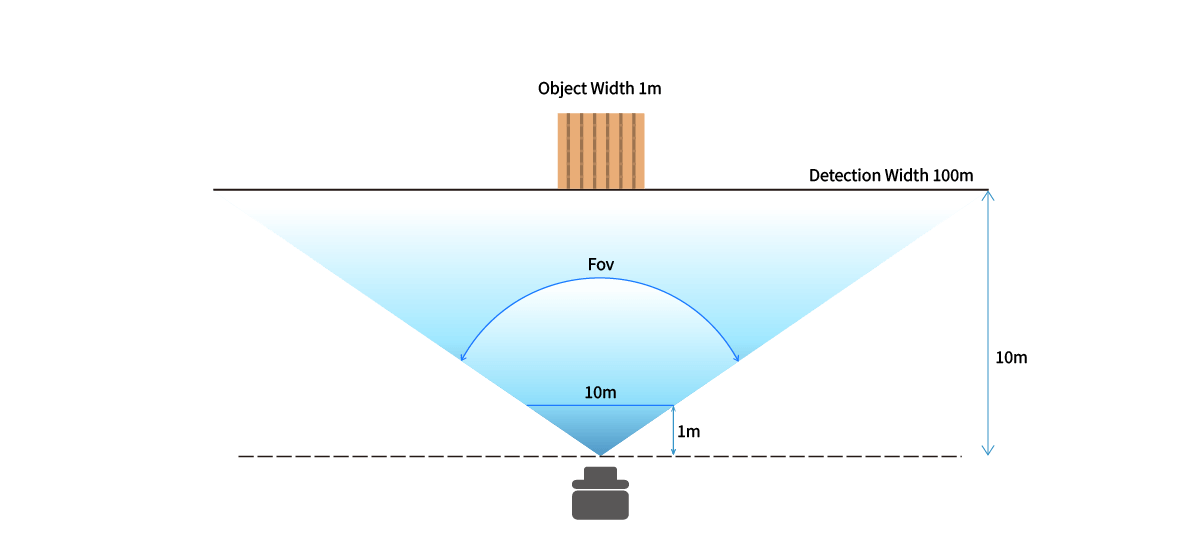
図 1.視野(FOV)と解像度計算の説明図
最大速度、制御時間、最小検知距離、物体サイズを定義することで、エンジニアはカメラの視野角(FOV)や解像度を正確に決定できます。これにより、屋外環境での安全なナビゲーションと正確な障害物検知に最適化されたビジョンシステムを構築できます。もちろん、より高解像度のカメラを選択すれば、長距離検知やよりスムーズな車両制御のための余裕時間を確保できます。
oToBriteは、自動運転アプリケーションの多様なニーズに対応するために、幅広いカメラ解像度、視野角(FOV)構成、およびインターフェースオプションを提供しています。カメラセレクターで当社の全製品ラインアップをご覧ください。
3. HDRおよびLEDフリッカーミティゲーション(LFM)
屋外環境では、カメラは明るい日光、影、トンネル、LED式の信号機など、非常に変動の激しい照明条件にさらされます。これらの状況で信頼性の高い認識を実現するために、重要なカメラの機能として、高ダイナミックレンジ(HDR)とLEDフリッカーミティゲーション(LFM)の2つがあります。
◆ HDR(ハイダイナミックレンジ):
HDRは、カメラが同じフレーム内の明るい部分と暗い部分の両方の詳細を捉えることを可能にします。屋外の自律走行車両においては、少なくとも120 dBのHDRがあれば、露出オーバーや露出アンダーを軽減し、直射日光下や日陰の条件でもAI検出に適した鮮明な画像データを確保できます。
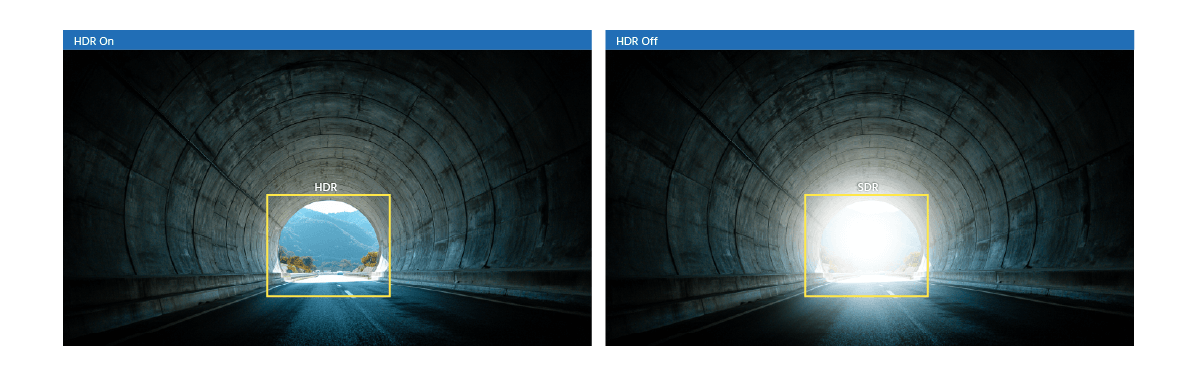
図 2.HDRはAI検出のために鮮明でバランスの取れた画像を保証します。
◆ LFM(LEDフリッカーミティゲーション):
多くの屋外環境には、LEDを使用した信号機、標識、車両のインジケーターが含まれています。LFMは安定した照明表現を保証し、認識システムが信号機、警告灯、その他のLEDベースの視覚的手がかりを正しく認識できるようにします。

図 3.LFMは交通信号および警告表示の正確な認識を保証します。
HDRおよびLFMを搭載したカメラは、画像品質を向上させるだけでなく、AIによる認識の信頼性も高めます。特に、照明が急激に変化したり、高周波LED光源を含む複雑な屋外環境において効果を発揮します。
4. 自動車グレードカメラ
屋外自律走行車両は、夏の酷暑から冬の凍結環境まで、温度変化の大きい環境で運用されることが多くあります。そのような条件下でも安定した性能を確保するためには、AEC-Q100によるセンサー信頼性やISO 16750による環境耐久性試験など、厳格な自動車規格に準拠した自動車グレードのイメージセンサーを搭載したカメラを選ぶことが重要です。これらのカメラは、通常-40°Cから+85°Cまでの広い動作温度範囲に耐え、過酷な屋外条件下での連続運用に必要な堅牢性を備えています。
5. 信頼性
実際の屋外運用では、カメラは振動、雨、ほこり、泥、急激な温度変化などに常にさらされます。これらはいずれも画像品質の低下や、最悪の場合はデバイスの故障を引き起こす可能性があります。長期的な信頼性を確保するためには、カメラソリューションは以下の規格を満たすことがテストされ、実証されている必要があります。
- 振動・衝撃耐性(ISO 16750)
- 防塵・防水性能(IP67/IP69K)
これらの試験に準拠していることは、カメラが過酷な環境に耐え、安定した画像品質を維持し、屋外自律走行車両のミッションクリティカルな運用におけるダウンタイムを低減できることを保証します。
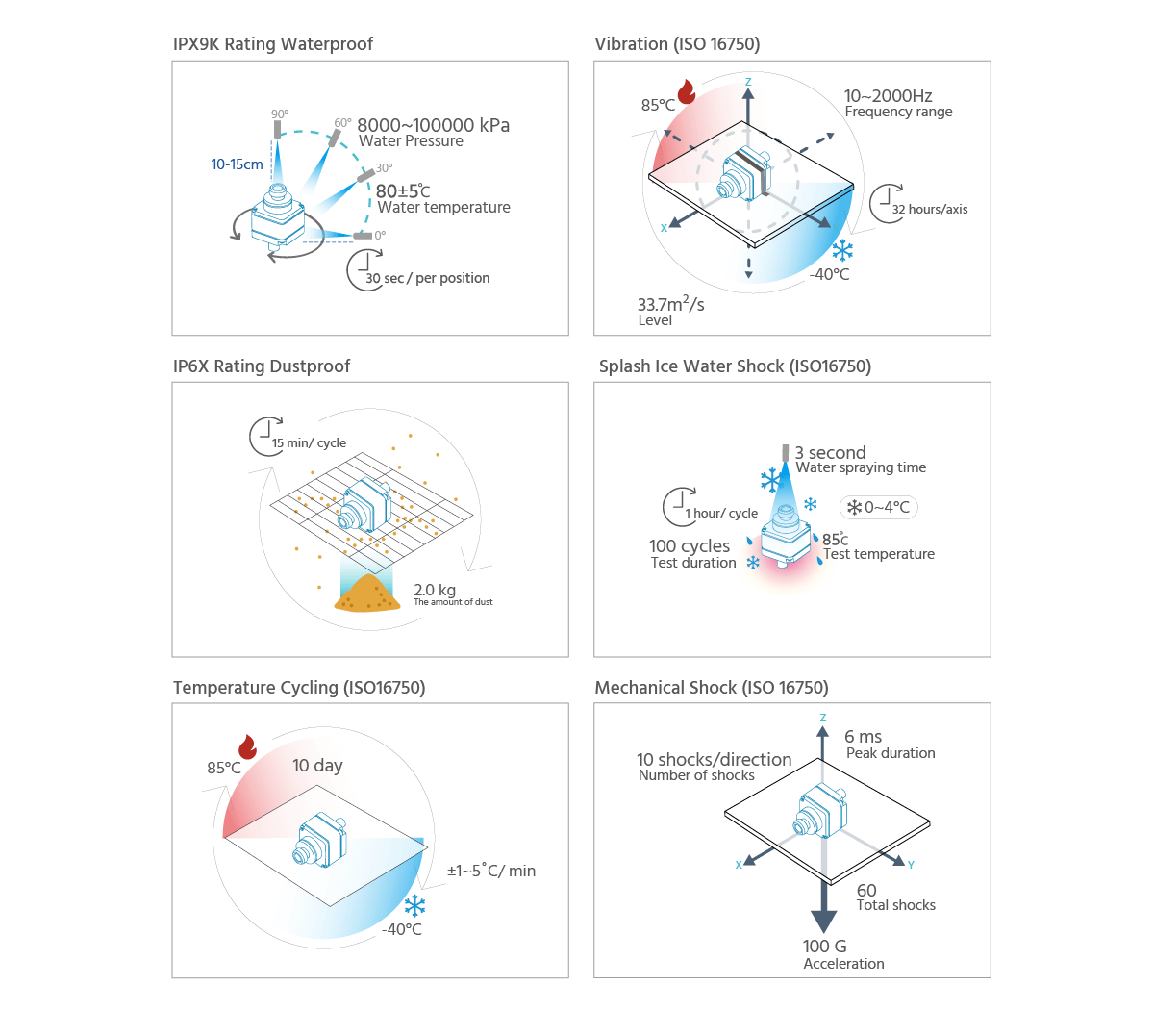
図 4.oToBriteのカメラは厳格な試験を通じて自動車グレードの信頼性基準を満たしています。
6. アクティブアライメント(AA)アセンブリ
屋外自律走行車両において、カメラの画像の鮮明さは非常に重要です。すべてのピクセルが正確な認識と信頼性の高いAI検知に寄与するためです。**アクティブアライメント(AA)**は、製造過程でレンズとイメージセンサーをピクセルレベルで精密に整列させるカメラモジュールの組立プロセスです。
産業用カメラで広く用いられるCマウントやSマウントのような従来の機械的アライメントとは異なり、AAはリアルタイムの光学フィードバックを用いて、レンズ位置をサブミクロン精度で調整します。このプロセスにより、ぼやけ、色収差、ピクセルのずれなどの光学的歪みを最小限に抑え、視野全体でシャープな画像を実現します。
AAアセンブリを採用することで、カメラメーカーは過酷な屋外環境でも高性能な認識に最適化されたモジュールを提供でき、すべてのピクセルが鮮明であることを保証します。これは、自律走行車両において非常に重要です。
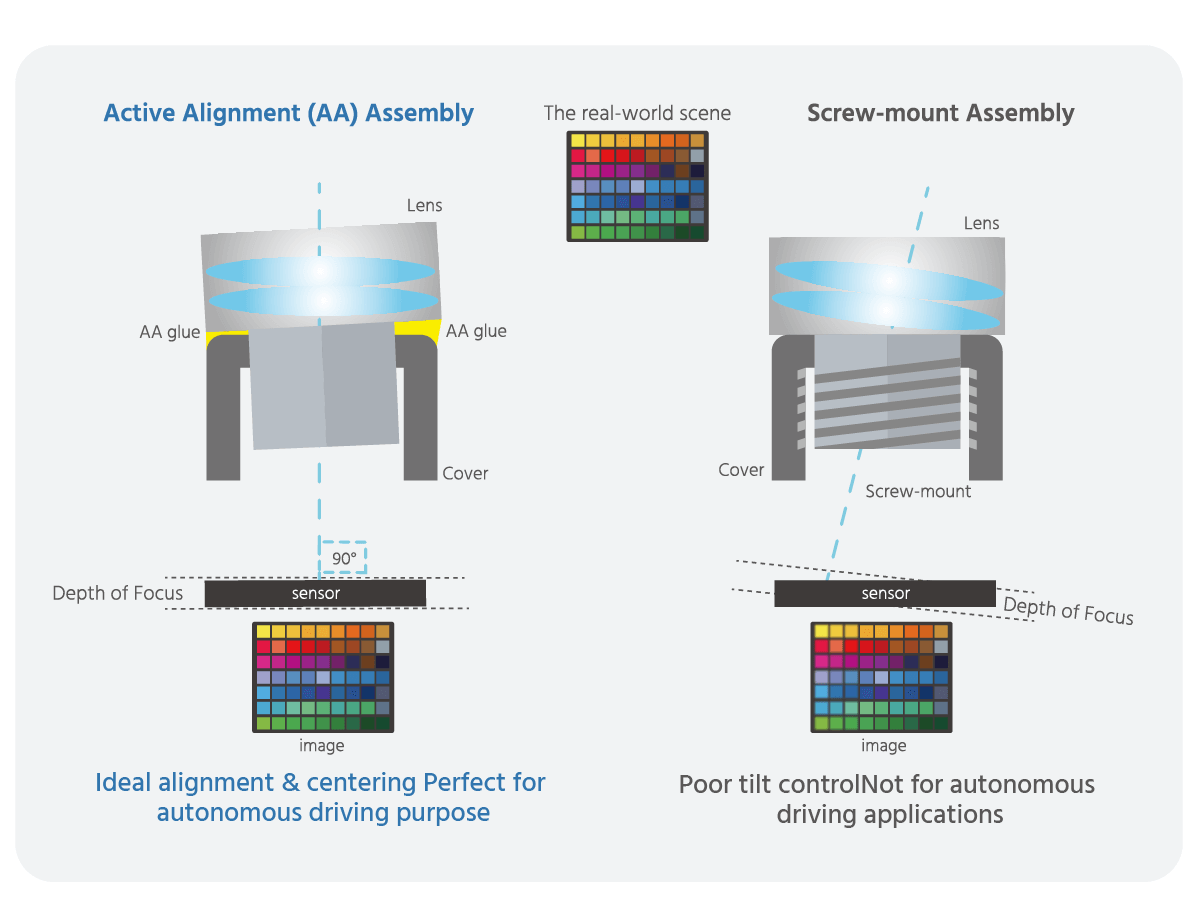
図 5.アクティブアライメント組立とネジ固定組立の比較
7. カメラ台数と処理要件
屋外自律走行車両に搭載するカメラの総数は、コンピューティングプラットフォームの仕様を直接決定する重要な要素です。カメラが増えるほど、画像データのスループットが増加し、帯域幅の要求も高まり、AI処理負荷も増大します。そのため、処理ハードウェアの選定は、カメラ構成に応じて最初から計画する必要があります。
例えば、ほとんどの自律走行車両で使用されているNVIDIA Jetsonプラットフォームを例に取ると、搭載するカメラ台数や解像度に応じて、必要なGPUやメモリ帯域が変わることが分かります。
- 1~4台のカメラ:NVIDIA Jetson Orin™ NX / Nano
- 4~8台のカメラ:NVIDIA Jetson AGX Orin
- 8台以上のカメラ:NVIDIA Jetson Thor
カメラの台数を早期に決定することで、エンジニアは処理ハードウェアの適切な規模を見極め、リアルタイム自律運転に必要な帯域幅とAI性能を確保できます。
結論
屋外自律走行車両向けのカメラ選定には、インターフェース、視野角(FOV)、HDR/LFM機能、自動車グレード規格、信頼性、光学アセンブリ、処理要件のすべてを総合的に考慮するアプローチが求められます。これら7つの要素に対応することで、エンジニアは、過酷な環境下でも安全かつ効率的な自律運転に不可欠な、精度・耐久性・リアルタイム性能を兼ね備えたビジョンシステムを構築できます。
oToBriteでは、SONY IMX390、IMX490、IMX623、IMX728、ISX021、ISX031、onsemi AR0823などのセンサーオプションを搭載した幅広いGMSL™カメラを提供しており、FOVは30°~195°まで選択可能です。多様な自律走行アプリケーションのニーズに対応しています。
主な特長
- NVIDIA Jetson AGX Orin™、Orin™ NX、Orin™ Nano、Intel® Core™ Ultra 7/5 プロセッサーなど、エッジAIコンピューティングモジュールをサポートしています。
- Advantech、ADLINK、AVerMedia、Axiomtek、Neousys、SINTRONES、Vecowなどの主要なIPCプラットフォームと完全に互換性があり、エッジAIおよび産業用途での信頼性の高い展開を実現します。
- Daimler Truck、Toyota、Xpengなど複数の自動車OEMに採用されており、これまでに120万台以上の自動車用カメラが出荷されています。
- -40°C〜85°Cの環境や100Gの衝撃にも耐える、20以上の自動車グレード試験に合格。
- IP67およびIP69K規格に準拠した厳格な試験をクリアし、優れた防塵・防水性能を実現。
- 社内での5軸/6軸アクティブアライメント(AA)組立により、ネジ固定組立と比べてピクセルレベルの精度で鮮明かつ信頼性の高い画像を提供。
- HDRおよびLEDフリッカーミティゲーションにより、低照度・高コントラスト・動的な照明条件下でもクリアで安定した画像を実現。
AMRおよびUGV向けに特別設計されたカメラソリューションの詳細については、oToBriteカメラのウェブサイトをご覧ください。