内部キャリブレーション
-
home -
技術
技術 -
内部キャリブレーション
内部キャリブレーション
内部キャリブレーション
ビジョンAIシステムにおける絶対的な精度の確保
ビジョンAIシステムにおいて、カメラは単に画像をキャプチャするだけのものではなく、空間計測のための極めて重要なセンサーです。しかし、光学の物理的な性質上、すべてのカメラには精度に影響を及ぼす「歪み」が生じます。
oToBriteは、2D画像から3D環境認識への移行には、絶対的な幾何学的精度が必要であると考えています。内部キャリブレーション(Intrinsic Calibration)は、こうした光学的なばらつきを補正し、信頼性の高い認識を可能にする鍵となります。これにより、すべてのピクセルを実世界の座標へと正確に変換するための不可欠な技術的基盤が構築されます。
内部キャリブレーションが不可欠な理由
レンズの物理的な個体差の補正
カメラのレンズは、一つひとつが固有の物理的特性と微細な公差(トレランス)を持っています。ガラスの厚みや曲率、そしてCMOSセンサーに対する光学中心の正確な位置合わせは、製造されるユニットごとに異なります。精密な内部キャリブレーション(Intrinsic Calibration)を行わなければ、これらの変数が「光学ノイズ」となり、ビジョンAIシステムの安全性やパフォーマンスを損なう恐れがあります。
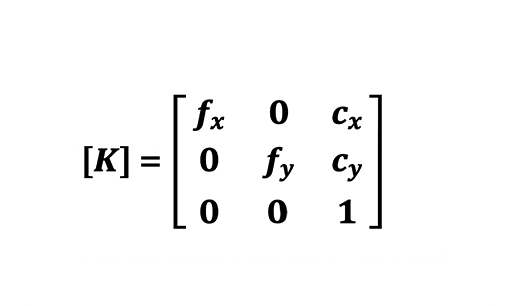
内部キャリブレーションでは、以下のようなカメラ内部の光学パラメータを定義します。
- 焦点距離 (fx, fy)
- 光学中心 (cx, cy)
- レンズの歪曲収差特性
空間計測における信頼性の向上
精密な内部キャリブレーション(Intrinsic Calibration)が実施されない場合、技術的な不正確さが連鎖的に発生し、システムの信頼性を直接的に損なうことになります。これらのパラメータが定義されていなければ、カメラはピクセル座標を実世界の幾何学的な位置へ正確にマッピングできず、距離推定や深度認識において重大な誤差が生じます。
360°サラウンドビューやAVM(アラウンドビューモニター)システムなどのマルチカメラ構成においては、キャリブレーションされていないレンズを使用すると、画像のつなぎ合わせ(ステッチング)のズレや歪んだ視覚的アーティファクトが発生します。
最終的に、こうした幾何学的な歪みはAI認識アルゴリズム全体のパフォーマンスを低下させ、物体検知や自律走行における致命的なエラーを招く可能性があります。
高精度な内部キャリブレーション
oToBriteは、ミッションクリティカルなビジョンデータをパートナー企業へ提供するため、自動運転やロボット工学の厳格な要求に応える最先端のキャリブレーション環境を運用しています。
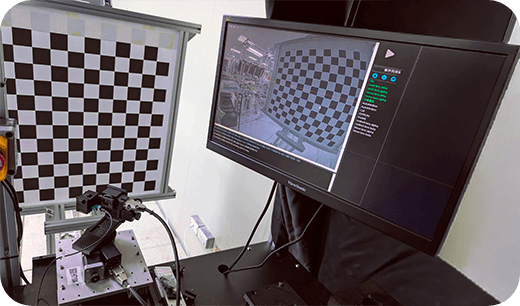
包括的な環境設定
当社のキャリブレーション施設は、広範な光学構成に最適化されています。広角サラウンドビューカメラから長距離ADASセンサーまで、どのようなシステムにおいても一貫した結果を保証します。
- 柔軟な動作範囲:各カメラモジュールの特定の画角(FOV)に基づき、カメラからキャリブレーションチャートまで最大 20メートルの距離に対応し、緻密な調整を行います。
- 標準化された互換性:OpenCV互換の内部パラメータを採用・サポートしており、グローバルなコンピュータビジョン・フレームワークやエッジAIプラットフォームとのシームレスな統合が可能です。
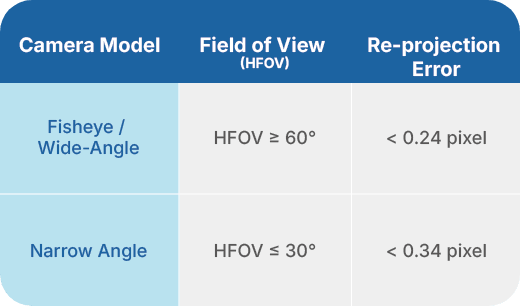
業界をリードするキャリブレーション精度
精度の指標には、投影された3D地点と、それに対応する画像平面上の2Dピクセルとの距離を示す「再投影誤差(Re-projection Error)」を用います。oToBriteは、多様なレンズタイプにおいてサブピクセル単位の精度を実現しています。