內參校準
確保視覺 AI 系統的絕對精準度
在視覺 AI 系統中,相機不僅用於捕捉影像,更是空間測量的關鍵感測器。然而,受限於光學元件的物理特性,相機產生的畸變(Distortion)往往會影響數據準確性。我們深知,若要將 2D 影像轉化為精準的 3D 環境感知,必須具備絕對的幾何精度。透過精密的內參校準(Intrinsic Calibration)技術,我們能有效修正光學誤差,確保視覺系統具備絕對的幾何精確度,讓每一個像素都能準確還原為真實世界的空間座標。
為什麼內參校準是必要的?
修正物理鏡頭的個體差異
每一顆相機鏡頭都具有獨特的物理特性與微小的製造公差。鏡片厚度、曲率,以及光學中心相對於 CMOS 感測器的精確對齊位置,在每一台產出的裝置上都不盡相同。若缺乏精確的內參校準,這些變數將產生「光學雜訊」,進而危及視覺 AI 系統的安全與性能。
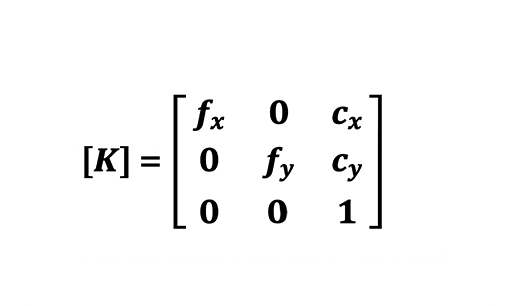
內參校準定義了相機內部的光學參數,包含:
- 焦距 (Focal length): fx, fy
- 光學中心 (Optical center): cx, cy
- 鏡頭畸變特性 (Lens distortion characteristics)
提升空間測量的可靠性
若未能執行精確的內參校準,將引發連鎖性的技術誤差,直接威脅系統的可靠性。缺乏這些關鍵參數,相機便無法將影像像素精確對應至現實世界的幾何空間,導致距離估算與深度感知產生嚴重偏差。在多鏡頭配置(如 360° 環景或 AVM 系統)中,未經校準的鏡頭會導致影像拼接錯位及畫面扭曲變形。這些幾何失真會直接干擾 AI 感知演算法的準確度,甚至可能導致物件偵測與自動導航判斷失效。
高精度內參校準
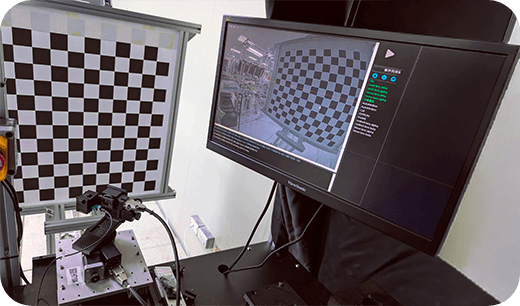
為了向合作夥伴提供關鍵重要的視覺數據,歐特明建置了最先進的校準環境,透過最高規格的測試環境,我們能確保校準精度達到自動駕駛與機器人產業的嚴格標準。
完整的環境建置
我們的校準設施針對多種光學配置進行了優化,無論系統是使用廣角環景相機,或是長距離 ADAS 感測器,都能確保獲得一致且精準的校準結果。
- 靈活的作業範圍:支援相機至校準圖表最長 8 公尺的距離,並針對每款相機模組的視角(FOV)進行細膩調整,確保最佳校準效果。
- 標準化相容性: 我們採用並支援 OpenCV 相容的內參格式,確保能與全球電腦視覺框架及邊緣運算(Edge AI)平台無縫銜接。
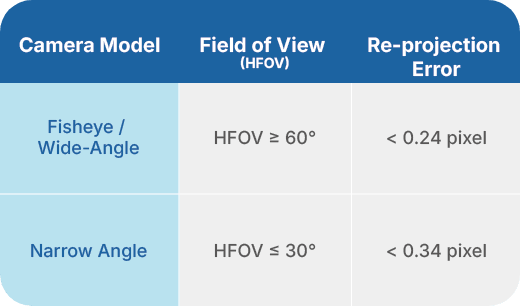
領先業界的校準精度
我們以重投影誤差(Re-projection Error)作為精度衡量標準,即 3D 空間點投影至影像平面後,與對應 2D 像素之間的距離偏差。歐特明針對各類鏡頭類型,均能實現次像素等級(Sub-pixel)的極致精準度。