如何為戶外AMR和無人車選擇最佳的車用相機?

-
首頁 -
新聞與活動
新聞與活動 -
如何為戶外AMR和無人車選擇最佳的車用相機?
如何為戶外AMR和無人車選擇最佳的車用相機?
戶外自主移動車輛(如 AMR 自主移動機器人與 UGV 無人地面載具)運行於嚴苛且動態的環境中,可靠的視覺系統對於安全導航與即時決策十分重要。選擇合適的相機規格並不僅是挑選高解析度感測器而已,更是需要系統性地評估介面技術、環境耐用性、光學品質及運算需求,確保整體感知系統能滿足戶外自駕應用的性能要求。
本文將說明工程師在為戶外自主車輛選擇相機時應考量的七大關鍵因素。
1. 介面(Interface)
相機介面決定了影像資料如何傳輸至處理單元,並直接影響延遲、頻寬及系統穩定性。對於戶外自主車輛而言,常見的兩種介面為 GMSL™ 與 Ethernet(乙太網路)。
◆ GMSL™ (Gigabit Multimedia Serial Link)
GMSL™ 可透過單一同軸線或屏蔽雙絞線(STP)進行長距離傳輸(最長可達 15 公尺)。此技術專為嚴苛的電磁環境設計,具備強大的抗 EMI 能力、穩定的資料傳輸及超低延遲特性,這些特性對於即時感知與障礙物閃避非常重要。此外,GMSL™ 支援 同軸供電(Power-over-Coax, PoC),可簡化佈線並降低系統複雜度。
◆ Ethernet(乙太網路)
乙太網路提供標準化的網路連接與良好的可擴充性,但通常延遲較高,且在影像傳輸時需要壓縮,因此更適合用於非即時的感測融合任務,而非即時視覺處理。
綜合以上所述,若要在戶外自主車輛中實現穩定、低延遲的視覺傳輸,GMSL™ 通常是更佳的選擇。
2. 視野範圍(Field of View, FOV)與解析度
決定戶外自主車輛需要「看得多遠、看得多廣」取決於其行駛速度、所需的控制或反應時間,以及必須偵測的物體尺寸。這些因素會直接影響相機的視野範圍(FOV)與解析度需求。
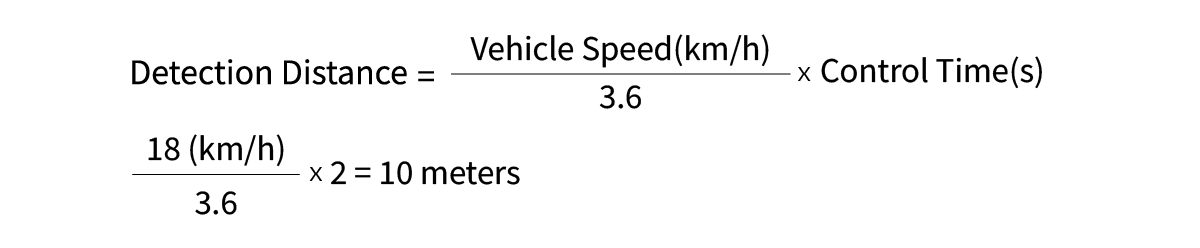
◆ 最小偵測距離(Minimum Detection Distance)
例如,當車輛的最高行駛速度為 18 公里/小時,且需要 2 秒的反應時間 時,相機必須能夠在至少 10 公尺外偵測到物體。
◆ 視角 (FOV):
若相機的最近偵測距離為 1 公尺,且在該距離下所需的覆蓋寬度為 10 公尺,則可依下列方式計算出水平視角(FOV)
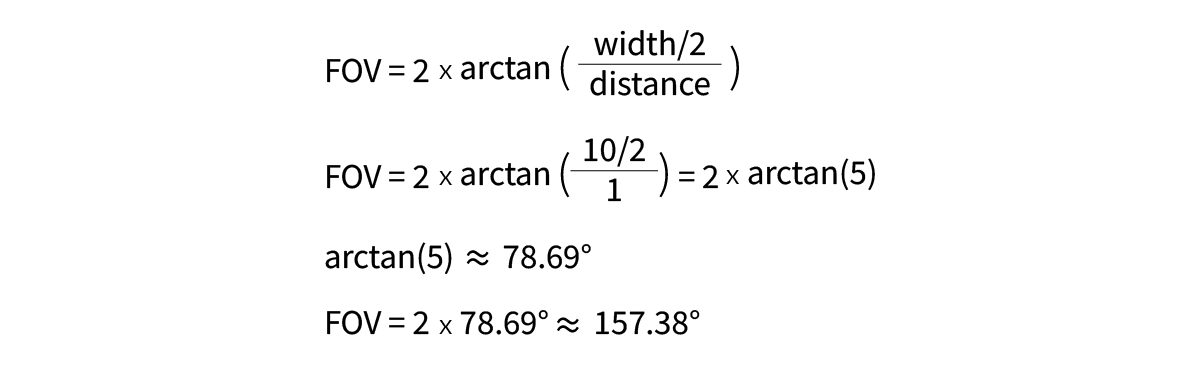
因此,該相機必須具備至少 157.4° 的水平視角(FOV),才能在 1 公尺距離處拍攝到寬度為 10 公尺的區域。
◆ 解析度(Resolution):
根據在最小偵測距離(10 公尺以外)時的視野範圍(FOV),偵測寬度(Dw)為 100 公尺。若需偵測寬度為 1 公尺的物體(Ow),並希望該物體在影像感測器上至少佔有 20 個像素作為最低需求,則可依下列方式計算出影像水平方向所需的像素總數:

若相機使用 16:9 長寬比的影像感測器:
在此範例中,為滿足偵測需求,相機必須具備至少 2.25 百萬像素(megapixels) 的解析度。

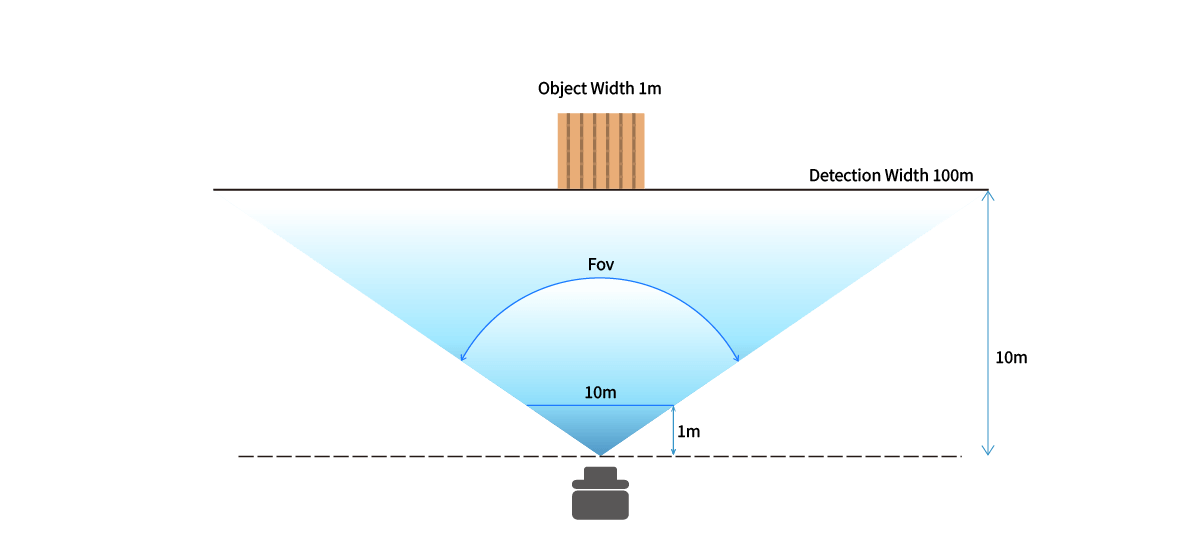
圖示:FOV 與解析度計算示意圖
透過定義最大車速、控制時間、最小偵測距離及目標物尺寸,工程師能精準地確定相機的 FOV(視野範圍)與解析度。這可確保視覺系統在戶外環境中進行安全導航與精確障礙物偵測時達到最佳化。當然,選擇更高解析度的相機,能在延長偵測距離的同時,為車輛控制提供更充裕的反應時間與更平順的操作體驗。
歐特明提供多樣化的相機解析度、視野範圍(FOV)組合及介面選項,以全方位滿足自駕應用的各種需求。歡迎前往相機篩選器瀏覽完整產品組合。
3. 高動態範圍(HDR)與 LED 閃爍抑制(LFM)
戶外環境中的光照條件變化劇烈,例如強烈陽光、陰影、隧道以及使用 LED 的交通號誌。為了在這些情況下確保可靠的影像感知,相機必須具備兩項關鍵功能:高動態範圍(HDR) 與 LED 閃爍抑制(LFM)。
◆ HDR(High Dynamic Range,高動態範圍):
HDR 使相機能夠在同一畫面中同時捕捉明亮與陰暗區域的細節。對於戶外自駕車而言,至少 120 dB 的 HDR 可有效減少過曝與欠曝現象,即使在強烈陽光直射或陰影環境下,也能為 AI 偵測提供清晰的影像資料。
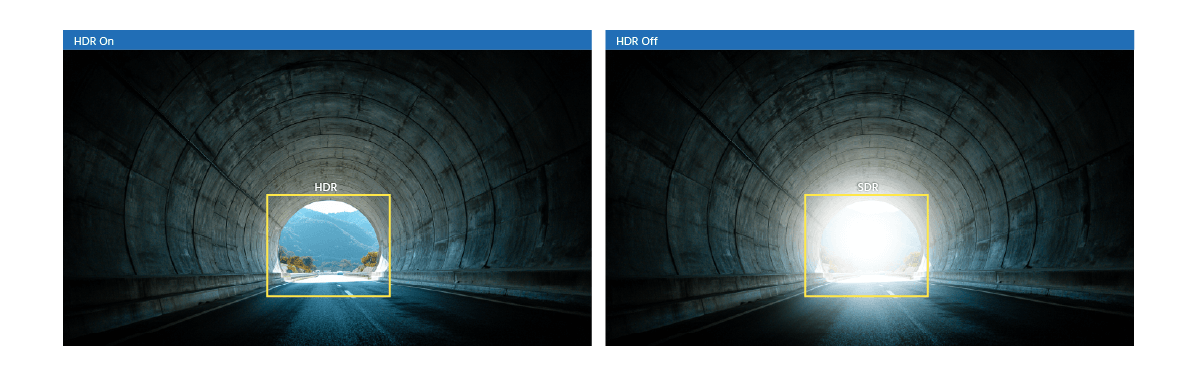
圖示:HDR 可確保 AI 偵測所需的影像清晰且亮度均衡。
◆ LFM(LED Flicker Mitigation,LED 閃爍抑制):
許多戶外環境中存在使用 LED 的交通號誌、標誌與車輛指示燈。LFM 可確保穩定的光源呈現,使感知系統能正確辨識交通信號、警示燈以及其他以 LED 為基礎的視覺提示。

圖示:LFM 可確保交通號誌與警示燈的準確辨識。
搭載 HDR 與 LFM 的相機,不僅提升影像品質,也增強 AI 感知的可靠性,尤其在光線變化劇烈或存在高頻 LED 光源的複雜戶外環境中,更能保持穩定的偵測效果。
4. 車用相機
戶外自駕車通常運行於環境溫度劇烈變化的場域,例如夏季的高溫或冬季的低溫。為確保相機在這些條件下穩定運作,選用具備車用級影像感測器的相機非常重要,且需符合嚴格的車用標準,如感測器可靠性測試 AEC-Q100 與環境耐久性測試 ISO 16750。這類相機必須能承受廣泛的工作溫度範圍(通常為 -40°C 至 +85°C),並具備在惡劣戶外環境中持續使用所需的耐用性。
5. 可靠性
在實際戶外運行中,相機會持續面臨振動、雨水、灰塵、泥濘以及快速溫度變化等挑戰,這些因素可能降低影像品質,甚至導致設備故障。為確保長期可靠性,相機解決方案必須經過測試並證明符合以下標準:
- 振動與衝擊防護(ISO 16750)
- 防塵防水保護(IP67/IP69K)
透過這些測試,可驗證相機在惡劣條件下的耐用能力,保持穩定的影像品質,並在關鍵任務的戶外自駕車應用中降低停機風險。
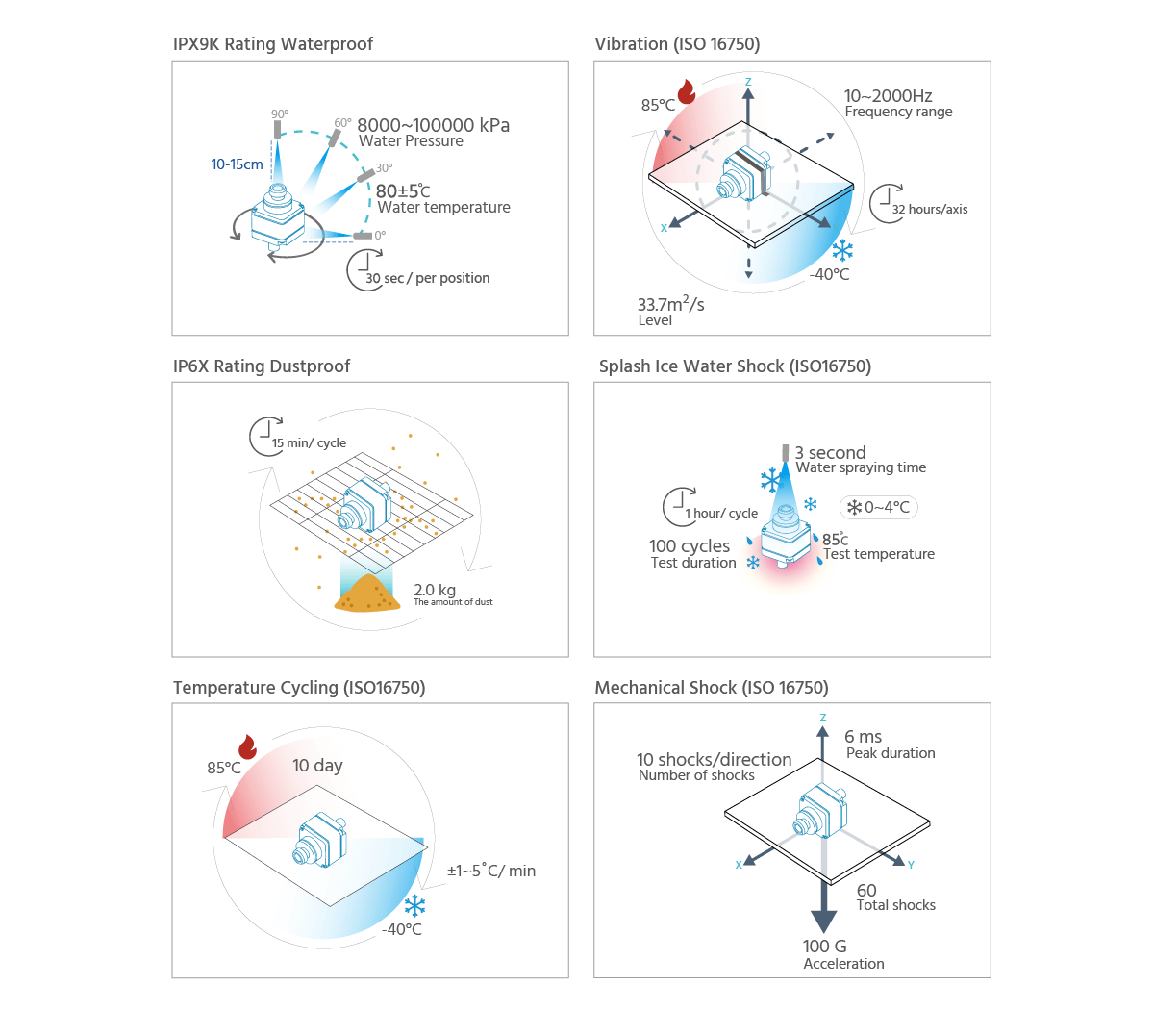
圖示:歐特明的相機透過嚴格測試,達到車用可靠性標準
6. 主動對準(Active Alignment, AA)組裝
對於戶外自駕車而言,相機影像的清晰度十分重要,以確保每個像素都能提供準確的感知資訊和可靠的 AI 偵測。主動對準(AA) 是一種精密的相機模組組裝技術,在製造過程中可將鏡頭與影像感測器在像素級精準對準。
與工業相機常用的傳統機械對準(如 C-mount 或 S-mount)不同,AA 採用即時光學回饋(real-time optical feedback),可實現鏡頭定位的亞微米精度。此技術可最小化光學失真,如影像模糊、色差或像素錯位,從而在整個視野範圍內呈現更銳利的影像。
透過採用 AA 組裝,相機製造商能提供經過優化的模組,以應對惡劣戶外環境下的高性能感知需求,確保每個像素清晰可用,對自駕車而言尤為關鍵。
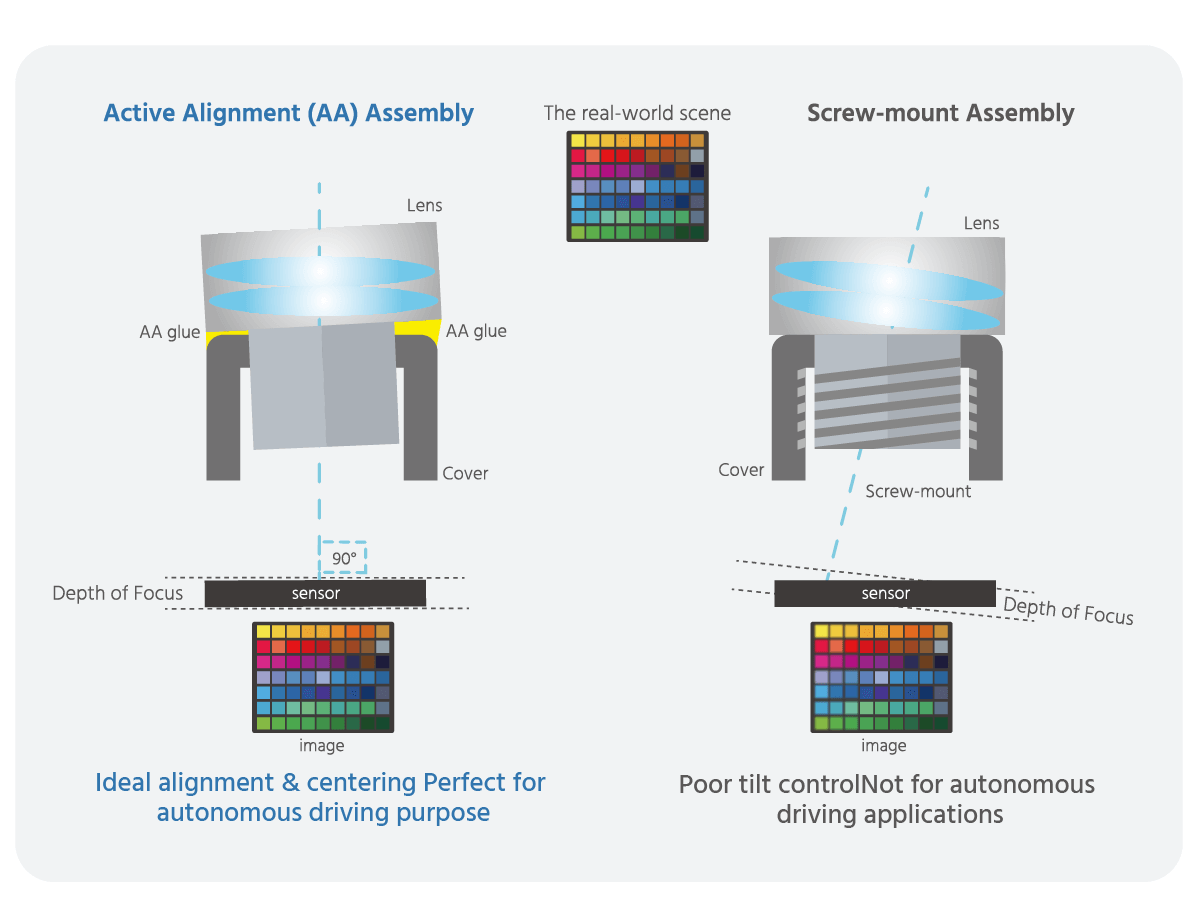
圖示:主動對準(Active Alignment, AA)組裝與螺絲固定(Screw-mount)組裝的比較
7. 相機數量與運算需求
戶外自駕車上的相機總數是決定運算平台規格的關鍵因素。相機數量越多,代表影像資料的傳輸量越大、頻寬需求越高,AI 運算負載也隨之增加。因此,處理硬體的選擇必須從一開始就與相機配置相匹配。以大多數自駕車採用的 NVIDIA Jetson 平台 為例:
- 1–4 台相機: NVIDIA Jetson Orin™ NX / Nano
- 4–8 台相機: NVIDIA Jetson AGX Orin
- 8 台以上相機:NVIDIA Jetson Thor
若早期就能確定相機數量,工程師可正確評估處理硬體規格,確保具備足夠的頻寬與 AI 運算性能,以支援即時自動駕駛。
結論
為戶外自駕車選擇相機,需要採取全面性考量,涵蓋介面、視野範圍(FOV)、HDR/LFM 功能、車用標準、可靠性、光學組裝方式以及運算需求。綜合考慮這七個因素,工程師才能打造出具備精準度、耐用性與即時效能的視覺系統,確保自駕車在複雜環境中安全且高效率地運行。
歐特明提供多樣化 GMSL™ 相機,感測器選項包括 SONY IMX390、IMX490、IMX623、IMX728、ISX021、ISX031,以及 onsemi AR0823,視野範圍(FOV)從 30° 到 195° 不等,可滿足各種自駕應用需求。
主要特色:
- 支援邊緣 AI 運算模組,包括 NVIDIA Jetson AGX Orin™、Orin™ NX、Orin™ Nano 及 Intel® Core™ Ultra 7/5 處理器等。
- 完全相容於主流 IPC 平台,包括 Advantech、ADLINK、AVerMedia、Axiomtek、Neousys、SINTRONES 及 Vecow,確保在邊緣 AI 與工業應用中的可靠部署。
- 已被多家汽車 OEM 採用,包括 Daimler Truck、Toyota 及 Xpeng,截至目前已出貨超過 120 萬台車用相機。
- 通過 20+ 項車用測試,即使在 -40°C~85°C 或 100G 衝擊條件下依然可靠。
- 經嚴格測試,符合 IP67 及 IP69K 標準,具備優異防塵與防水能力。
- 自行研發的 5/6 軸主動對準(AA)組裝,相較於螺絲固定組裝,可提供像素級精度的清晰可靠影像。
- HDR 與 LED 閃爍抑制(LFM)確保在低光、高對比及動態光線環境下,影像清晰且一致。
如需了解專為 AMR(自主移動機器人)與 UGV(無人地面車輛)設計的相機解決方案,請參考 AMR / UGV 機器人應用相機模組