駐車支援の進化:バックアップアラームからビジョンAIによる自動駐車まで

-
home -
ニュースとイベント
ニュースとイベント -
駐車支援の進化:バックアップアラームからビジョンAIによる自動駐車まで
駐車支援の進化:バックアップアラームからビジョンAIによる自動駐車まで
駐車はドライバーにとって常に最も難しい作業の一つです。初期のバックアップアラームやシンプルなビープ音センサーから、今日の完全自動バレーパーキングを可能にするカメラベースのAIシステムまで、パークアシストの進化は先進運転支援システム(ADAS)開発における最も顕著なマイルストーンの一つです。
始まり:ソナーベースのバックアップアラームシステム
ソナー(超音波センサー)は、1980年代後半から1990年代初頭にかけて、バックアップアラームシステムとして初めて車両に搭載されました。通常、リアバンパーに2~4個のセンサーが搭載されていました。これらのセンサーは超音波を用いて近くの障害物を検知します。超音波トランスデューサーは高周波音波を発射し、物体に当たると反射して戻ってきます。音波が戻ってくるまでの時間を測定することで、システムは障害物までの距離を計算します。この情報は、ビープ音やドライバーインターフェース上の視覚的な警告を通じて伝えられ、駐車時や後退時の衝突回避に役立ちます。
後退駐車や低速操縦において、ソナーセンサーは段階的な警告を発します。車両が物体に近づくと、ビープ音が速くなったり、視覚的なインジケーターがより強く表示されたりします。高度なシステムでは、ソナーベースのシステムの中には、衝突を防ぐために自動的にブレーキをかけ、安全性を向上させるものもあります。
超音波センサーの限界とビジョンベースの駐車システムへの移行
早期後退警報や駐車支援システムの基盤となる超音波センサーは、いくつかの技術的な限界に直面しており、これがビジョンベースの代替システムの採用を促しています。超音波センサーの主な限界は次のとおりです。
- 検知範囲の制限:0.2~3メートルの範囲内でしか有効ではなく、低速駐車のシナリオにのみ適しています。
- 環境干渉:雨、雪、気温の変化、周囲の騒音によって超音波が歪む可能性があり、距離測定の精度が低下します。
- 物体分類機能の欠如:これらのセンサーは距離を測定しますが、物体の種類(歩行者、車両、壁など)を識別したり、動きを検知したりすることができないため、状況認識能力が制限されます。
これらの制約を克服するため、自動車業界はビジョンベースのシステムへと移行してきました。oToBriteの高性能リアカメラとサラウンドカメラは、車両周囲の鮮明なリアルタイム画像を提供し、視認性を向上させ、歩行者、車両、縁石、その他の障害物の検知を可能にします。これらのシステムは多角度ビューと画像ベースのアラートを提供し、駐車時の安全性とドライバーの安心感を向上させます。
進化する安全規制は、この移行をさらに加速させています。米国では、FMVSS 111により、すべての乗用車にリアビューカメラの搭載が義務付けられ、後方視界を確保し、特に歩行者や子供との衝突を防止しています。欧州では、ECE R46が間接視覚装置(ミラー、カメラなど)を規制し、ECE R158はバックアップアラームや駐車支援システムにも要件を拡張しています。これらの規格は、現代の安全要求を満たすために、oToBriteの高度なカメラシステムなどのカメラ中心のソリューションへの依存が高まっていることを浮き彫りにしています。
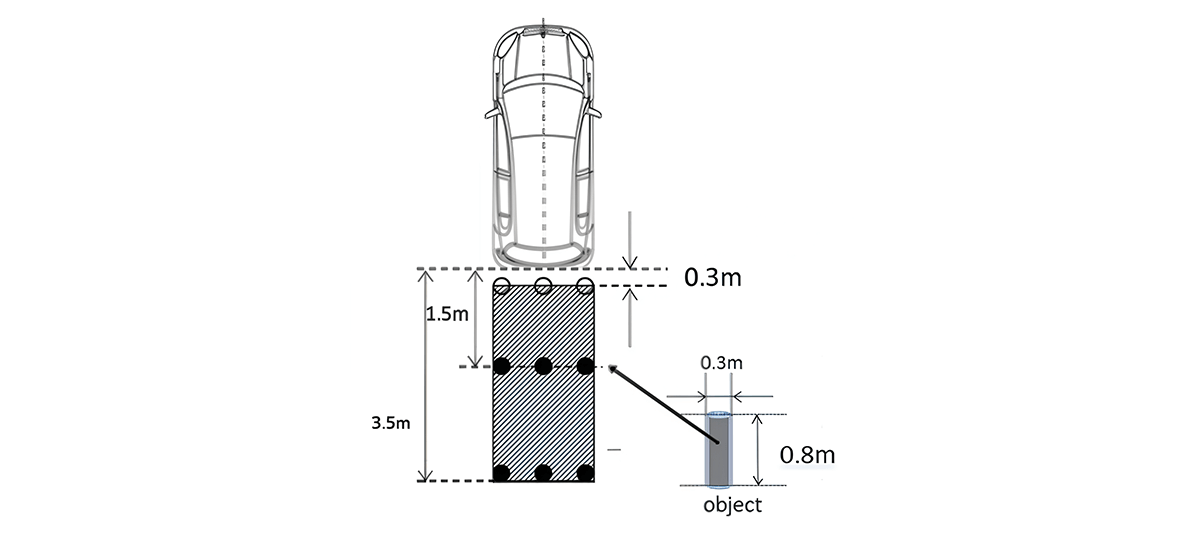
図1: UN R158 - 近距離後方視界
ソナーベースの自動駐車システム
混雑した都市部や狭いスペースでの駐車は、時に困難を伴います。この問題を解決するため、2000年代半ばに導入された最初の自動駐車システムは、フロントとリアのバンパーに8~12個の超音波センサーを搭載し、利用可能なスペースを検知してステアリングを自動で操作していました。これらのセンサーは超音波の送受信によって近くの障害物までの距離を測定し、ドライバーの負担を軽減していました。
しかし、ソナーベースのシステムには、角度分解能が低い、検知範囲が狭い(通常0.2~3メートル)、雨や騒音などの環境要因の影響を受けやすいといった制約がありました。また、駐車白線の検知や物体の種類識別ができないため、性能が一定せず、ドライバーの導入も限られていました。こうした制約から、業界はカメラとAIベースのビジョンシステムへと移行しました。これらのシステムは、より高い精度、駐車白線の認識、そして高度な駐車支援技術の信頼性向上を実現します。
ソナーからビジョンAIへ:自動駐車支援(APA)の台頭
2018年までに、ソナーのみの駐車システムの限界は克服され、ビジョンベースの新世代自動駐車支援(APA)技術への道が開かれました。サラウンドビューカメラと超音波センサーを組み合わせたこれらのシステムは、リアルタイムの視覚的状況把握、駐車ラインの検出、そして正確な障害物認識を提供します。AIベースの画像処理により、検出精度と判断力が向上し、自動駐車操作において90%以上の成功率を達成しています。
oToBriteのビジョンAI自動駐車支援(APA)システムは、この進歩を体現するものです。4台のサラウンドビューカメラと専用ECUを搭載し、低い障害物を検知し、駐車スペースの位置を特定し、駐車番号を読み取り、道路利用者を識別します。独自のVision-AIモデルは、暗い場所や強いグレアなどの困難な状況でも信頼性の高いパフォーマンスを発揮し、安全で効率的な駐車を実現します。
この進化により、ドライバーの監視なしに車両が Vision-AI と SLAM テクノロジーを使用して駐車場を自律的に移動する自動バレー パーキング (AVP) の基盤が整います。

図2:サラウンドビューカメラとソナーセンサーの配置場所
ビジョンAI APAシステムにおける主要課題の克服
多様な駐車環境において汎用性、安全性、そして精度を確保するため、oToBriteのVision-AI自動駐車支援(APA)システムは、いくつかの重要な課題に取り組んでいます。
◆ 多様な駐車場構成
oToBriteのAPAシステムは、単線、二重円弧、T字型線、そして垂直、平行、45度傾斜といった向きを含む、100種類以上の駐車スペースを認識します。また、コンクリート、アスファルト、ポリ、エポキシ、レンガといった様々な路面材質や、バリアフリー、ファミリー、EV充電といった特殊なスペースにも適応し、幅広い互換性を実現します。
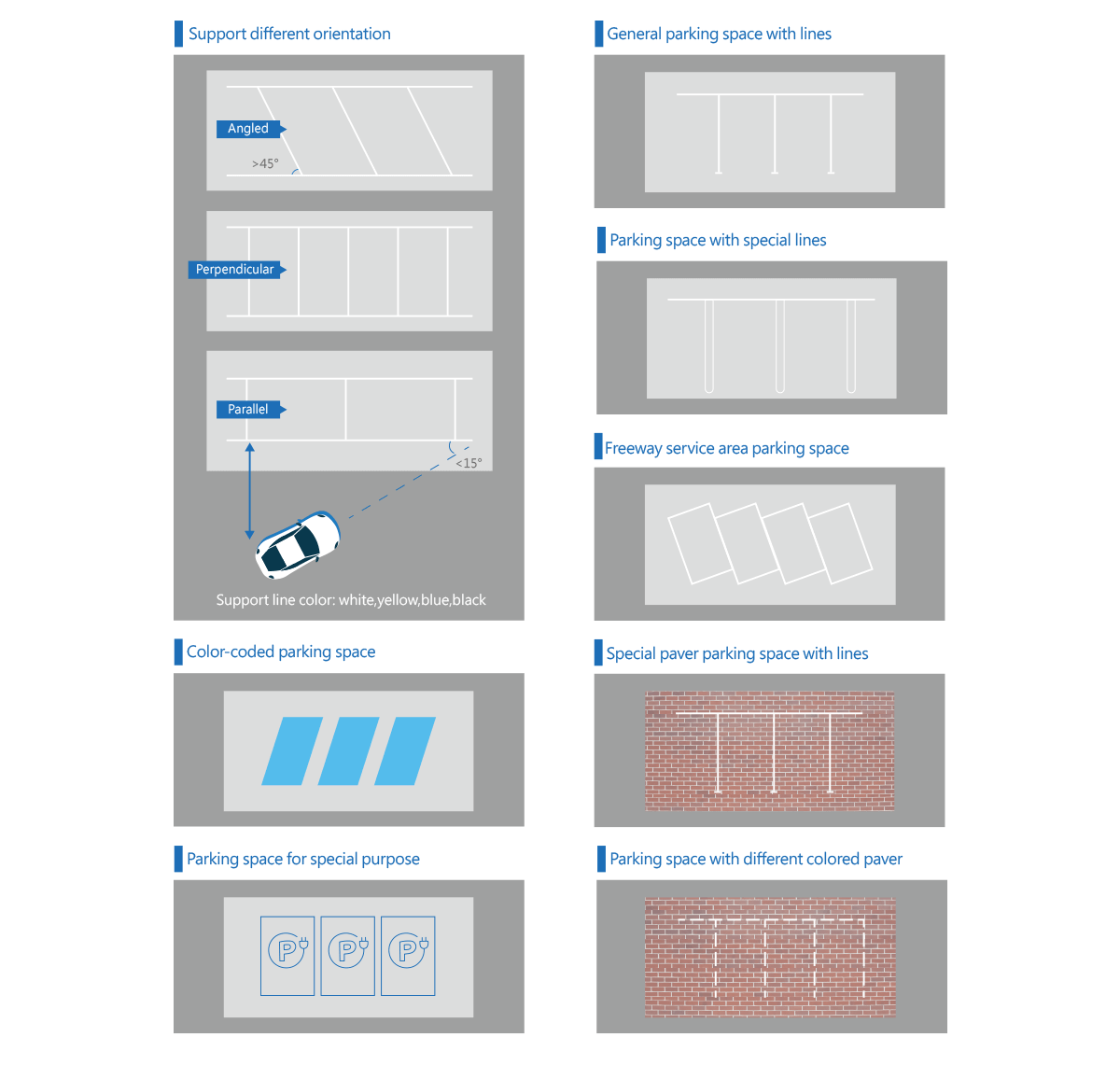
図3. oToBriteのVision-AI APAシステムは、多様なレイアウトと路面を持つ100種類以上の駐車スペースをサポートしています。
◆ 行き止まり駐車スペース検知
oToBriteのAPAシステムは、壁、柱、出入口付近の狭い空間で優れた性能を発揮し、10cm未満の測位精度を実現することで、狭い環境でも正確かつ安全な操縦を実現します。
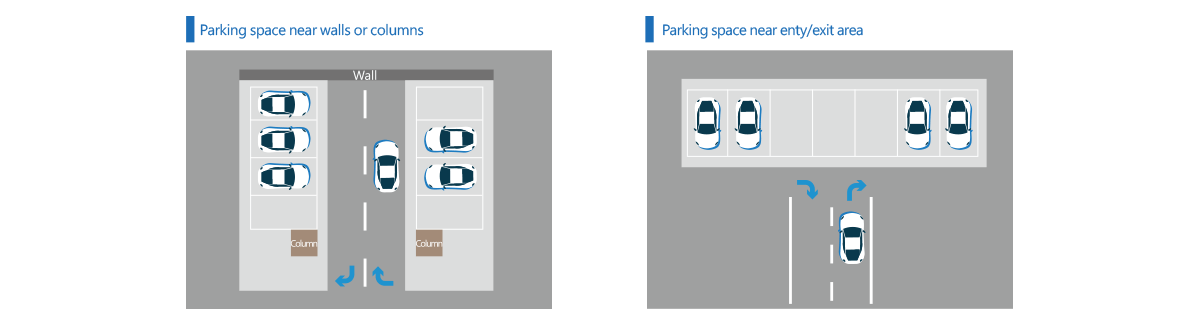
図4. 行き止まり駐車スペース検知による全範囲のカバー範囲
◆ 低高度障害物分類
安全性を高めるため、システムは交通コーン、車止め、パーキングロック、スピードバンプ、縁石などの低高度障害物を検知・分類し、車両の走行可能スペースを正確に計算して衝突を防止します。
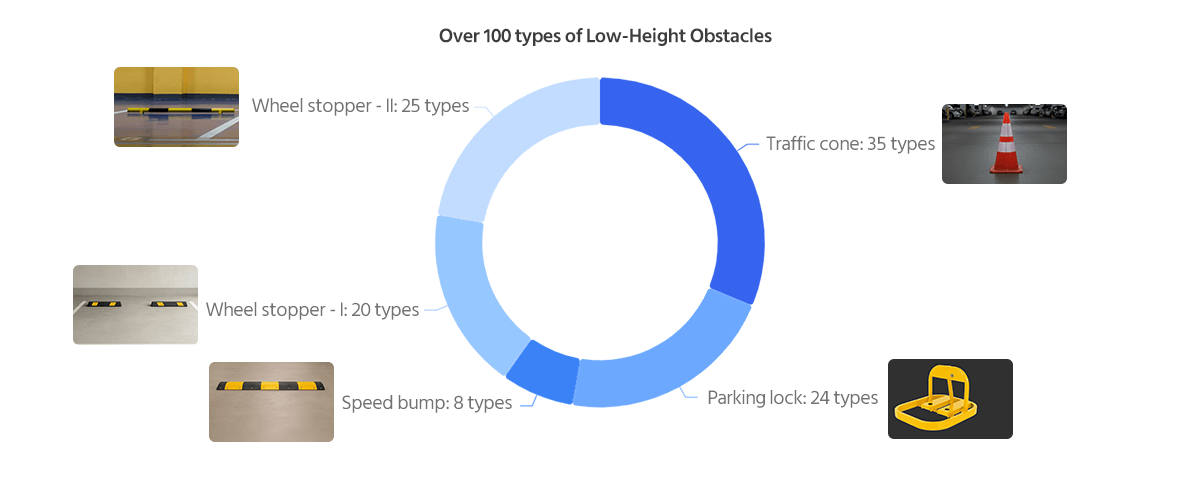
図5. システムは、交通コーン、車止め、パーキングロック、スピードバンプなど、100種類以上の低高度障害物を分類します。
これらの課題を克服することで、oToBriteのVision-AI APAシステムは、信頼性が高く安全な自動駐車を実現し、自動バレーパーキング(AVP)などの完全自律型ソリューションへの道を開きます。
アシストパーキングから完全自動運転へ:自動バレーパーキング(AVP)への進化
自動駐車支援(APA)から最終的に自動駐車/自動バレーパーキング(AVP)への進化は、自動運転車にとって極めて重要な進歩です。APAは、ドライバーの監視下で駐車時にステアリング、アクセル、ブレーキを自動化しますが、AVPはドライバーの介入を必要としません。ドライバーが降車地点で降車した後、車両は駐車場内を自律的に移動して空きスペースを探し、駐車し、指示に従ってピックアップエリアに戻ります。
AVPは、環境認識のためのビジョンAI と、正確な測位とナビゲーションのためのSLAM(自己位置推定と地図構築)によってこれを実現します。VSLAMテクノロジーと単一のフロントカメラを組み合わせることで、APAからAVPへのシームレスなアップグレードが可能になり、複雑で動的な状況下でも、駐車をスケーラブルで自律的な操作へと変革します。
現在量産中のoToBriteのoToParkingシステムは、この変化を象徴するものです。独自開発のVSLAMは、HDマップフリーの駐車場地図を生成することで、車両が空間を認識し、20cm未満の精度で自己位置推定することを可能にします。このシステムは最大1kmのルートを記憶し、駐車スペースを確保するまで自動旋回と障害物回避をサポートし、ユーザーが指定した場所へのモバイル呼び出し機能も備えています。
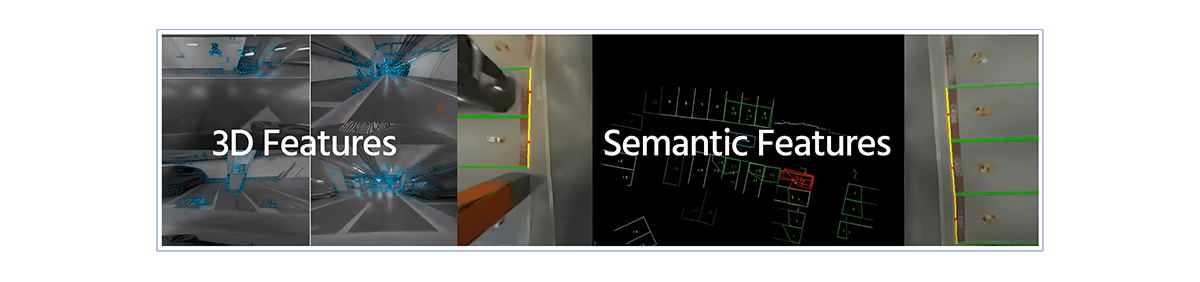
図6. oToBriteのSLAMは、セマンティック特徴と3D特徴を備えたマルチカメラビジョンAI技術を採用しています。セマンティック特徴は、様々な路面標示だけでなく、車両、柱、壁、縁石、車止めなどの物体もカバーできます。
oToBriteの自動バレーパーキング(AVP)の主な機能
- 1kmルート記憶:駐車場の再構築や外部インフラ整備なしに駐車経路を記憶します。
- VSLAM融合:非セマンティックマッピングとセマンティックマッピングを統合し、屋内外でシームレスな動作を実現。
- 自律走行およびサークル走行:リアルタイム障害物回避を行いながら、空きスペースを動的に探索・駐車を可能にする。
- ワンタイムマッピング:バレーパーキング機能と召喚機能の両方を、高い信頼性と再現性で実現。
oToParking - APA + AVP の詳細については、https://www.otobrite.com/ja/product/otoparking-apa-avp をご覧ください。