停車輔助系統演進:從倒車警示到視覺AI自動停車

-
首頁 -
新聞與活動
新聞與活動 -
停車輔助系統演進:從倒車警示到視覺AI自動停車
停車輔助系統演進:從倒車警示到視覺AI自動停車
停車一直是駕駛者最具挑戰性的任務之一,從早期的倒車警示器與簡單的蜂鳴感測器,到如今能夠實現全自動停車輔助的AI影像系統,停車輔助技術(Parking Assist)的演進,成為高級駕駛輔助系統(ADAS)發展過程中最具代表性的里程碑之一。
起源:超音波倒車警示系統
聲吶(超音波感測器)最早於 20 世紀 80 年代末至 90 年代初應用於車輛,作為倒車警示系統,通常在後保險桿上安裝二到四個感測器,這些感測器利用超音波探測附近的障礙物。超音波換能器發射高頻聲波,聲波在遇到物體時會反射回來,系統透過測量聲波返回所需的時間來計算與障礙物的距離。這些資訊透過駕駛者介面上的蜂鳴聲或視覺警報傳遞,幫助駕駛者在停車或倒車時避免碰撞。
在倒車停車與低速操作時,超音波感測器會提供分級警示,當車輛接近障礙物時,蜂鳴聲會加快或視覺警示會變強。在進階系統中,一些超音波倒車警示系統的配置甚至能自動施加煞車以防止碰撞,進一步提升安全性。
超音波感測器的侷限性與朝向視覺停車系統的轉變
作為早期倒車警示與停車輔助系統的基礎技術,超音波感測器面臨多項技術限制,這些限制推動了汽車產業朝向視覺解決方案的轉變。超音波感測器的主要限制包括:
- 偵測範圍有限:有效範圍僅 0.2 至 3 米,僅適用於低速停車場景。
- 環境干擾:雨雪、溫度變化和環境噪音會干擾超音波,導致距離測量不準確。
- 缺乏物體分類能力:這些感測器可以測量距離,但無法辨識物體類型(例如行人、車輛或牆壁)或偵測運動,這限制了對周圍環境的感知。
為了克服這些限制,汽車產業已轉向基於視覺的系統。 oToBrite 的高性能後視相機和環景相機可提供清晰的車輛周圍環境即時影像,增強視野,並能夠偵測行人、車輛、路緣石和其他障礙物。這些系統提供多角度視圖和基於影像的警報,進而提高停車時的安全性與駕駛者信心。
不斷發展的安全法規進一步加速了這項轉變。在美國,FMVSS 111 強制要求所有乘用車配備後視攝影機,以確保清晰的後方視野並防止碰撞,特別是與行人或兒童的碰撞。在歐洲,ECE R46 規範了間接視覺裝置(後視鏡、攝影機等),而 ECE R158 則將要求擴展到倒車警報和停車輔助系統。這些標準凸顯了人們對以攝影機為中心的解決方案(例如 oToBrite 的車用相機系統)日益增長的依賴,以滿足現代安全需求。
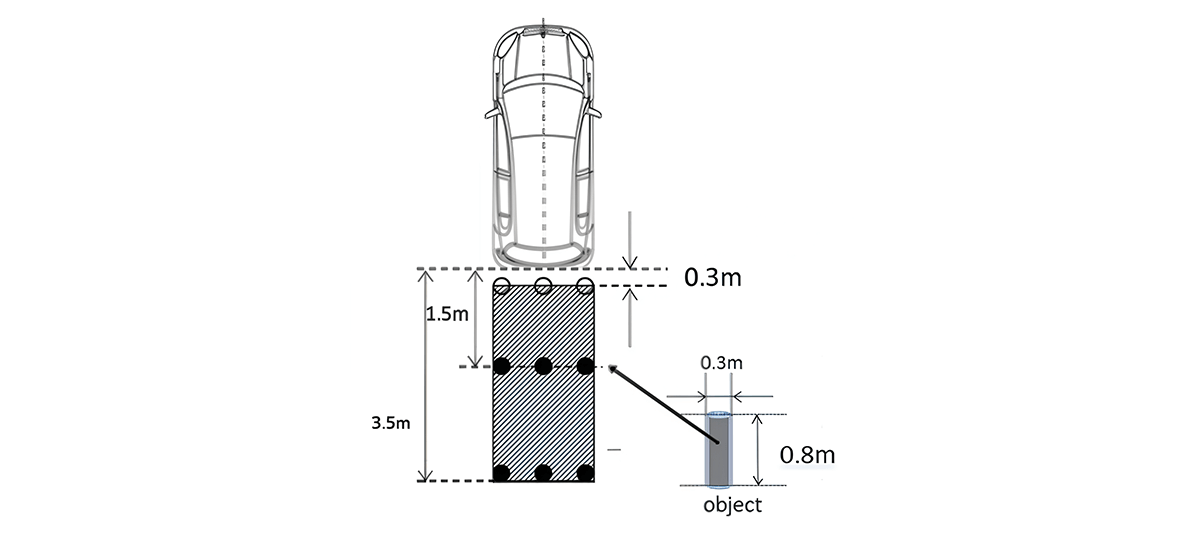
圖 1:UN R158 - 近距離後視視野
超音波自動停車系統
在擁擠的城市地區,停車位往往十分有限,停車也充滿挑戰。為了解決這個問題,2000 年代中期推出的首批自動停車系統,在車輛前後保險桿上安裝了 8 到 12 個超音波感測器,用於檢測可用車位並自動引導車輛轉向。這些感測器透過發射和接收超音波來測量與附近障礙物的距離,從而減輕駕駛者的工作負荷。
然而,基於聲吶的系統存在一些局限性,例如角度分辨率低、檢測範圍短(通常為 0.2 到 3 公尺)以及易受雨水或噪音等環境干擾。此外,它們也無法偵測停車線或識別物體類型,導致性能不穩定,駕駛者接受度有限。這些限制促使業界轉向攝影機結合人工智慧的視覺系統,這些系統能夠提供更高的精度、停車線識別能力以及更可靠的高級停車輔助技術。
從聲吶到視覺人工智慧:自動停車輔助 (APA) 的崛起
到 2018 年,僅依賴聲吶的停車系統的侷限性已為新一代基於視覺的自動停車輔助 (APA) 技術鋪平了道路。這些系統將環視攝影機與超音波感測器結合,提供即時視覺資訊、停車線檢測和精確的障礙物識別。基於人工智慧的影像處理提高了檢測精度和決策能力,在自動停車操作中實現了 90% 以上的成功率。
oToBrite 的視覺人工智慧 APA 系統正是這一進步的典範。該系統配備四個環景攝影機和一個專用 ECU,能夠偵測低矮障礙物、定位停車位、讀取停車位編號並識別道路使用者。其專有的視覺人工智慧模型確保了在弱光或強光等複雜條件下也能可靠運行,從而實現安全高效的停車。
這項發展為自主停車系統 (AVP) 奠定了基礎,在自主停車系統中,車輛可以使用視覺人工智慧和 SLAM 技術自主導航停車設施,而無需駕駛者監督。

圖 2:環視相機和聲吶感測器的部署位置
克服視覺人工智慧自動停車輔助系統的關鍵挑戰
為了確保在各種停車環境中都能實現多功能性、安全性和精準性,oToBrite 的視覺人工智慧自動停車輔助 (APA) 系統著重解決以下幾個關鍵挑戰:
◆ 多樣化的停車場佈局
oToBrite 的 APA 系統可辨識 100 多種停車位類型,包括封閉式單線、雙弧線、T 形線以及垂直、平行或 45 度角等不同方向的停車位。該系統可適應各種地面材料(混凝土、瀝青、聚合物、環氧樹脂和磚塊)和專用停車位(無障礙停車位、家庭停車位和電動車充電停車位),以實現廣泛的兼容性。
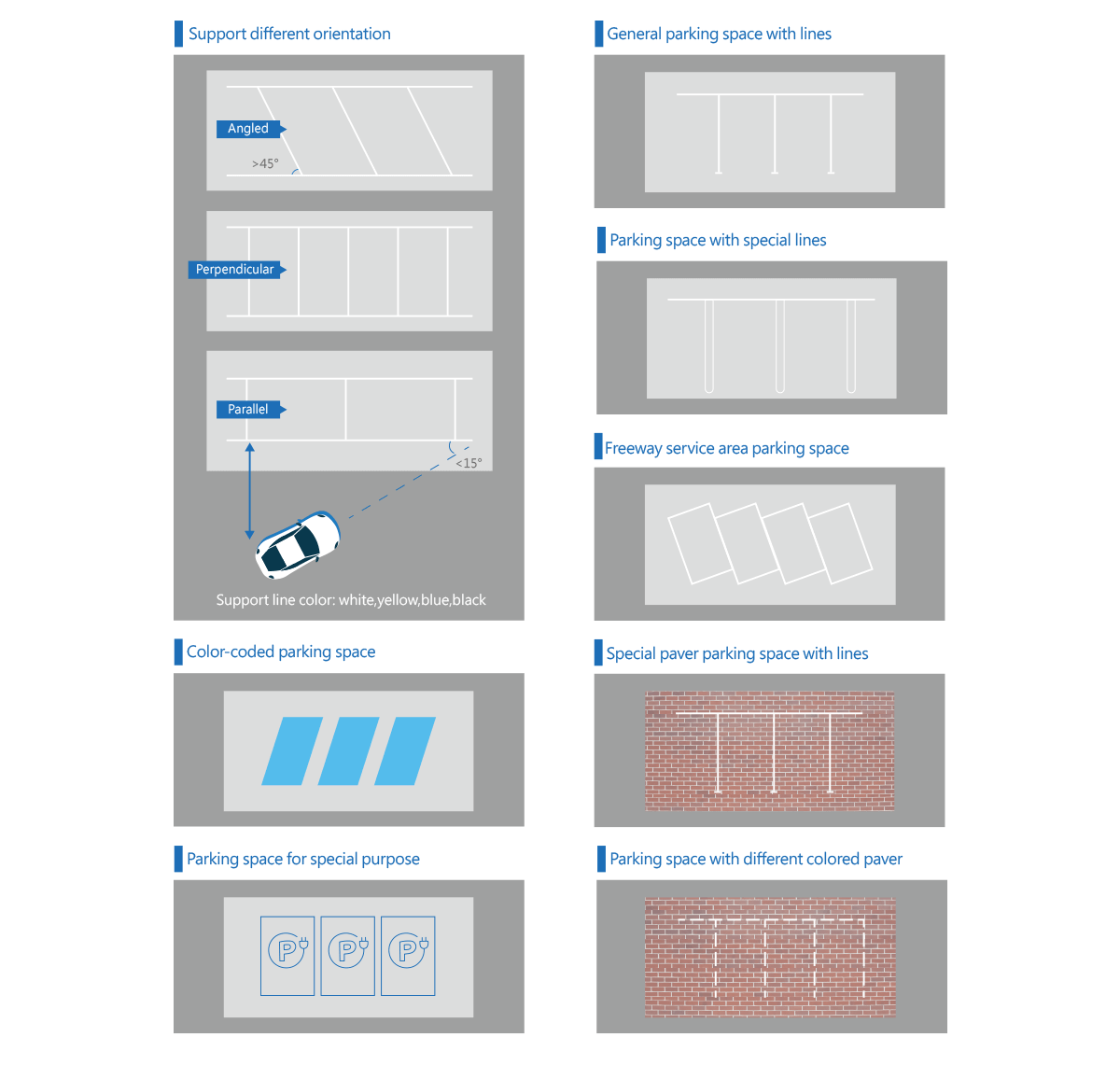
圖 3:oToBrite 的視覺人工智慧 APA 系統支援 100 多種不同配置與地面材質的停車位類型
◆ 死巷停車位偵測
oToBrite 的自動停車輔助(APA)系統在牆壁、柱體或出入口等狹窄空間中表現優異,能達到小於 10 公分的定位精度,確保在狹小環境中也能精準且安全地操作。
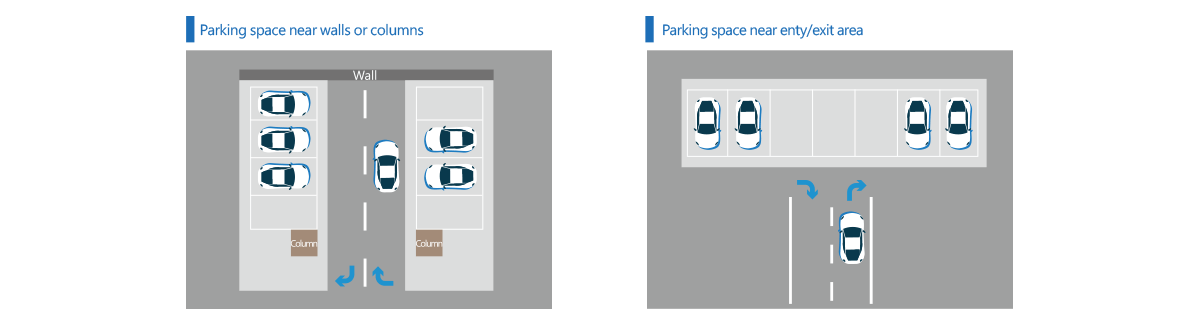
圖 4. 死巷停車格偵測的完整覆蓋能力
◆ 低高度障礙物分類
為提升安全性,系統能偵測並分類低高度物體,如交通錐、輪擋、地鎖、減速丘與路緣石,並精準計算車輛可行駛空間,以避免碰撞。
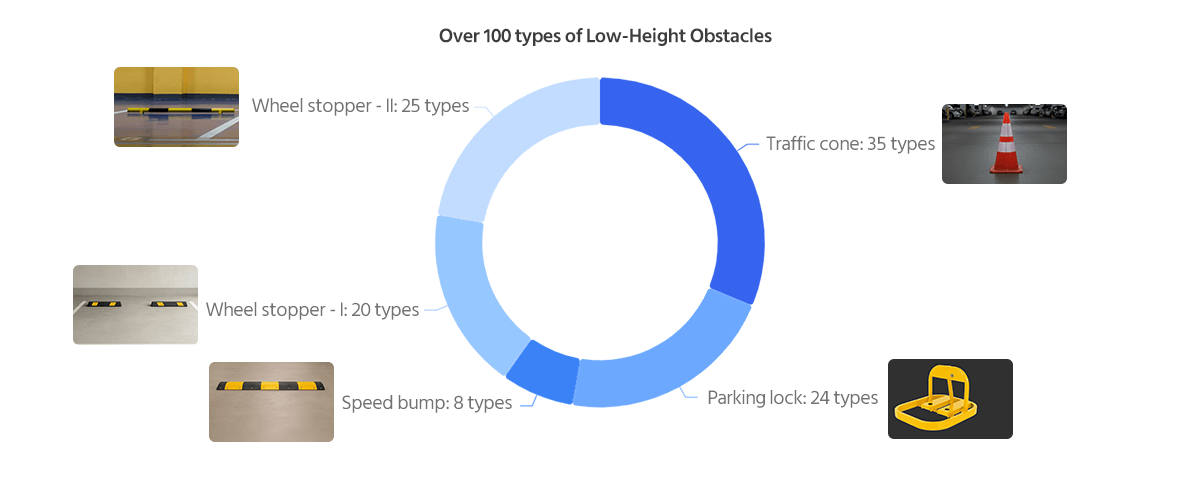
圖 5. 系統可分類超過 100 種低高度障礙物,包括交通錐、輪擋、地鎖與減速丘
透過克服這些挑戰,oToBrite 的視覺AI自動停車系統(APA)可提供穩定且安全的自動停車體驗,為全自動化的自主停車系統(AVP)技術奠定基礎。
從輔助停車到全自動化:邁向自主停車系統(AVP)的演進
從自動停車輔助(APA)逐步發展至全自主停車(AVP),是自動駕駛技術的重要里程碑。APA 能在駕駛監控下自動控制轉向、加速與煞車完成停車,而 AVP 則完全不需駕駛在場。當駕駛於指定下車區下車後,車輛能自主導航於停車場內,搜尋空位、自行停車,並可依指令自動返回接車區。
AVP 的實現仰賴視覺AI 進行環境感知,以及 SLAM(同步定位與建圖)技術達成精準定位與導航。結合 VSLAM 技術與一個前視相機,可讓系統從 APA 升級至 AVP,使停車在複雜且動態的環境中成為可擴展的自主作業流程。
oToBrite 自行開發的 oToParking 系統 已進入量產階段,正是這項技術轉變的代表。系統透過自研的 VSLAM 技術,在無需高精地圖的情況下生成停車場地圖,實現車輛自我感知與定位,定位精度小於 20 公分。系統可記錄最長達 1 公里的停車路線,支援自主巡航與避障功能,直到成功停車,並可透過行動裝置召喚車輛至指定位置。
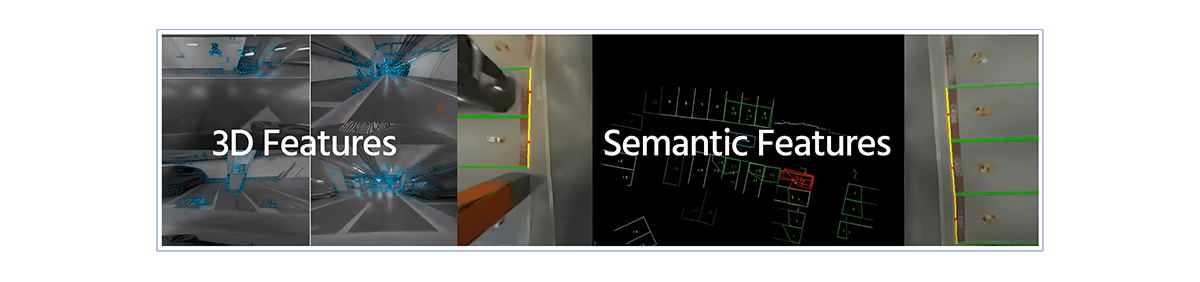
圖 6. oToBrite 的 SLAM 採用多攝影機 Vision-AI 技術,融合語義與 3D 特徵,語義特徵可涵蓋多種停車場元素,如車輛、柱體、牆面、路緣、輪擋等
oToBrite 自主停車系統(AVP)的主要特色
- 1 公里路線記憶:可記錄停車路徑,無需改造停車場或額外基礎設施。
- VSLAM 融合:結合非語義與語義建圖,實現室內外無縫運作。
- 自主導航與巡航:可動態搜尋可用停車位並即時避障。
- 一次建圖:單次建圖即可支援自主停車與召喚功能,確保可靠且可重複的運作表現。
了解更多關於oToParking - APA + AVP: https://www.otobrite.com/zh-TW/product/otoparking-apa-avp