AMR / UGV 機器人應用相機模組


-
首頁 -
產品
產品 -
相機模組
相機模組 -
AMR / UGV 機器人應用相機模組
AMR / UGV 機器人應用相機模組
AMR / UGV 機器人應用相機模組
GMSL™單目相機
我們提供專為戶外無人地面車輛(UGVs)與自主移動機器人(AMRs)設計的 GMSL™ 車規級相機模組,這些高耐用性的相機模組已廣泛應用於各種場景,包括自駕卡車、配送機器人、自主運礦車、自主場內搬運車以及自動化農業機具。我們的GMSL™ 相機模組能克服嚴苛的環境條件,提供高可靠性、卓越的影像品質,並無縫整合至邊緣運算平台。
精準製造
內部研發5/6軸主動式調焦(AA)技術,確保影像銳利度達到優異水準,並實現彈性且可擴展的生產流程,支援超過60種不同規格的製造,精度高達像素等級(1 像素)。


可靠度驗證
通過20項以上車規等級測試,包括隨機振動、機械衝擊、IP67/IP69K 防塵防水、溫度循環與冰水衝擊等,符合 ISO 16750 標準。
獲多家車廠信賴
歐特明的相機模組已被多家車廠採用,包括Daimler Truck、Toyota和小鵬汽車(Xpeng),車用相機累計出貨量已超過 120 萬顆。


支援邊緣AI計算與工業電腦整合
支援多種邊緣AI運算模組,包括NVIDIA Jetson Thor™、NVIDIA Jetson AGX Orin™、Orin™ NX、Orin™ Nano以及Intel® Core™ Ultra 7/5處理器。與主流工業電腦相容,已整合至Advantech(研華)、ADLINK(凌華)、AVerMedia(圓剛)、Axiomtek(艾訊)、Neousys(宸曜)、SINTRONES(鑫創)、Vecow(超恩)等系統中,適用於各種邊緣 AI 與工業應用場景,實現穩健部署。
應用情境
相關文章

如何為戶外AMR和無人車選擇最佳的車用相機?
產業洞察 - 2025.08.28

多鏡頭視覺AI SLAM 系統:應用於自主機器人與自駕車輛
產品聚焦 - 2025.07.04
下載 產品型錄
| 型號 | 解析度 / 快門類型 | 感測器 / 輸出格式 | 視角 | 輸出介面 |
|---|---|---|---|---|
| oToCAM264ISP-H61M | 2MP / Rolling | IMX390CQV / YUV422 | 63.9° | GMSL2™ |
| oToCAM264ISP-N73M | 2MP / Rolling | IMX390CQV / YUV422 | 73° | GMSL2™ |
| oToCAM264ISP-C120M | 2MP / Rolling | IMX390CQV / YUV422 | 120.6° | GMSL2™ |
| oToCAM264ISP-N186M | 2MP / Rolling | IMX390CQV / YUV422 | 186° | GMSL2™ |
| oToCAM222-H61M | 2MP / Rolling | ISX021 / YUV422 | 64° | GMSL2™ |
| oToCAM222-C120M | 2MP / Rolling | ISX021 / YUV422 | 120.6° | GMSL2™ |
| oToCAM222-S195M | 2MP / Rolling | ISX021 / YUV422 | 195.9° | GMSL2™ |
| oToCAM223-H61M | 3MP / Rolling | ISX031 / YUV422 | 63.9° | GMSL2™ |
| oToCAM223-C120M | 3MP / Rolling | ISX031 / YUV422 | 120.6° | GMSL2™ |
| oToCAM223-S195M | 3MP / Rolling | ISX031 / YUV422 | 195.9° | GMSL2™ |
| oToCAM274ISP-H100M | 3MP / Rolling | IMX623 / YUV422 | 100° | GMSL2™ |
| oToCAM274ISP-S195M | 3MP / Rolling | IMX623 / YUV422 | 195° | GMSL2™ |
| oToCAM260ISP-C30M | 5MP / Rolling | IMX490 / YUV422 | 30° | GMSL2™ |
| oToCAM260ISP-C62M | 5MP / Rolling | IMX490 / YUV422 | 62.5° | GMSL2™ |
| oToCAM260ISP-C120M | 5MP / Rolling | IMX490 / YUV422 | 120° | GMSL2™ |
| oToCAM271ISP-N30M | 8MP / Rolling | IMX728 / YUV422 | 30° | GMSL2™ |
| oToCAM271ISP-N70M | 8MP / Rolling | IMX728 / YUV422 | 70° | GMSL2™ |
| oToCAM271ISP-N120M | 8MP / Rolling | IMX728 / YUV422 | 120° | GMSL2™ |
| oToCAM276ISP-N30M | 8MP / Rolling | AR0823 / YUV422 | 30° | GMSL2™ |
| oToCAM276ISP-N120M | 8MP / Rolling | AR0823 / YUV422 | 120° | GMSL2™ |
GMSL™ 3D 雙目立體視覺相機

歐特明的長距GMSL™ 3D雙目立體視覺相機完美融合 120dB 高動態範圍 (HDR) 成像技術與全域曝光 (Global Shutter) 同步功能。即使在強光直射、陰影深處或特徵不明顯的低紋理環境下,仍能確保特徵提取的高穩定性。產品提供 60mm/120mm 雙基線設計,提供最遠達 20 公尺的精準深度感知能力,是戶外導航與障礙物偵測的理想選擇。支援 3D 自動校準與隨插即用 (Plug-and-Play) 功能,大幅降低系統整合難度並節省開發成本。
同步感測與高動態視覺
透過低於 1 微秒(<1µs)的硬體級全域快門同步技術,雙目相機可確保左右影像精準對齊。完整連動的自動曝光(AE)與自動白平衡(AWB),搭配內建 ISP,可為神經網路持續提供穩定且一致的影像輸入。結合 120dB 單色全域快門技術,即使在光影極端對比的戶外環境下,依然能有效保留陰影與高光中的關鍵細節,穩定擷取可靠的像素特徵。

光學精準度與無縫整合
透過精密的 5 軸主動對準(5-axis Active Alignment)製程,雙目相機可實現近乎完美的光學平行度,在最大化有效視野(FoV)的同時,具備車規等級的抗震與耐衝擊能力。搭配嚴謹的出廠預校準,每一台相機皆內建精確的內參與外參,實現真正的即插即用部署,從啟動的第一秒起,即可獲得精準且可靠的深度運算表現。
靈活基線配置:兼顧人機協作與長距感知
為因應多元應用需求,雙目相機提供靈活的基線配置,可同時滿足人機協作與工業場域應用。60mm 基線符合人眼瞳距(IPD, Interpupillary Distance),可提供舒適、低暈眩感的 VR 遠端操控體驗;搭配小於 9 公分的精巧機身與 IP69K 防護等級,能輕鬆整合至人形機器人系統中。針對長距離感知需求,120mm 寬基線設計可將深度感測距離延伸至 20 公尺,同時維持精巧且具備 IP69K 防護的設計,確保在重型機械與嚴苛環境下依然具備穩定可靠的運作效能。
| 型號 | 解析度 / 快門類型 | 感測器 / 輸出格式 | 視角 | 輸出介面 |
|---|---|---|---|---|
| oToCAM521G-H80M (Stereo) | 3MP / Global | IMX900 Mono / YUV422 | 80° | GMSL2™ |
| oToCAM521-H80M (Stereo) | 3MP / Global | IMX900 Color / YUV422 | 80° | GMSL2™ |
| oToCAM520G-H80M (Stereo) | 3MP / Global | IMX900 Mono / YUV422 | 80° | GMSL2™ |
| oToCAM520-H80M (Stereo) | 3MP / Global | IMX900 Color / YUV422 | 80° | GMSL2™ |
GMSL™ VIO相機

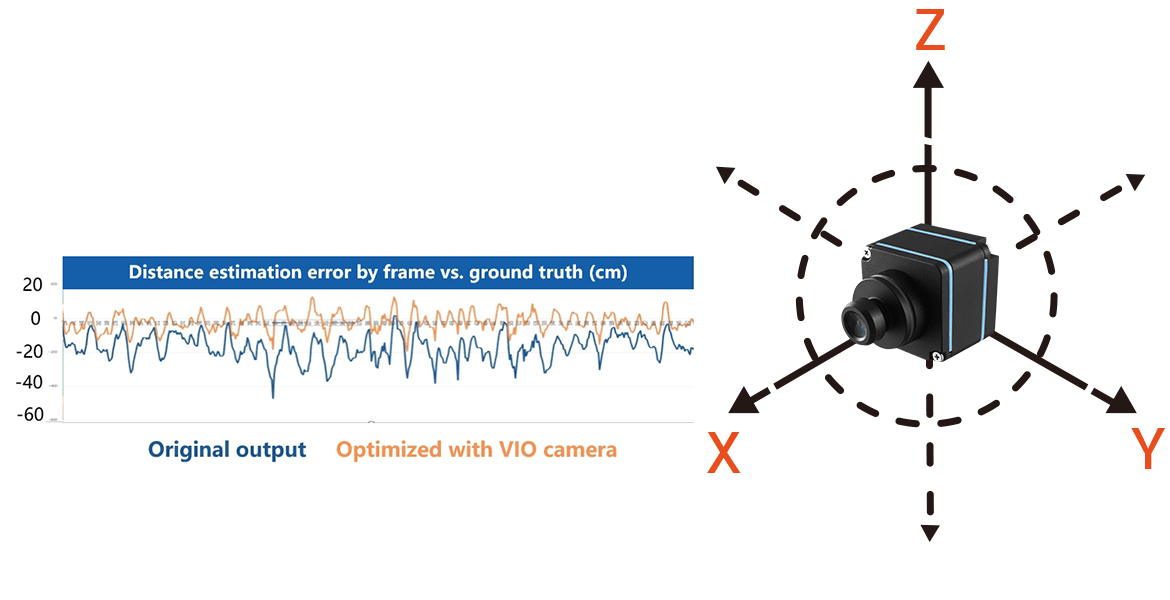
VIO(視覺慣性里程計)相機透過整合了IMU(慣性測量單元),可在經過卡爾曼濾波(Kalman Filter)處理後,提供加速度與角速度資料,有效補償振動,提供穩定的影像輸出和更精確的距離測量。該相機可增強自主機器人和無人車的導航和避障能力,確保在動態現實場景中穩定運行。
振動補償,實現精準定位
崎嶇地形與不平整路面常常會產生振動,導致降低視覺SLAM系統的效能。透過將IMU資料與影像融合,VIO相機模組能即時補償這些失真,提升深度預估的精準度,並減少定位誤差。即使在高度動態的戶外環境下,也能維持可靠的導航與障礙物迴避能力。

精簡整合,內建運算
歐特明的VIO相機將IMU與MCU直接整合於模組中,形成精簡獨立的系統架構。內建MCU可在6軸IMU資料(加速度計 + 陀螺儀)上透過擴展卡爾曼濾波(EKF)處理,提供可靠的姿態與動態數據,並同時減輕中央ECU的處理負擔。此設計降低了佈線複雜度、節省空間並提升系統可靠性,非常適合邊緣 AI 部署。
車規級可靠性,應對嚴苛環境
VIO相機模組依照嚴格的車規級標準打造,確保在戶外環境具備長期穩定性。其堅固設計能承受持續震動、極端溫度、強烈日曬、雨水與灰塵,確保在惡劣的應用環境下仍能穩定運作,滿足AMR、UGV及其他機器人平台對高可靠性的需求。

| 型號 | 解析度 / 快門類型 | 感測器 / 輸出格式 | 視角 | 輸出介面 |
|---|---|---|---|---|
| oToCAM269IMU-C120M | 3MP / Rolling | ISX031 / YUV422 | 120.6° | GMSL2™ |