oToGuard:整合式 360 度相機系統與公車及卡車 Level 2+ ADAS 解決方案

-
首頁 -
新聞與活動
新聞與活動 -
oToGuard:整合式 360 度相機系統與公車及卡車 Level 2+ ADAS 解決方案
oToGuard:整合式 360 度相機系統與公車及卡車 Level 2+ ADAS 解決方案
傳統 ADAS 整合面臨的挑戰
大型商用車輛,特別是在人口稠密之都市環境中運行的城市巴士與電動巴士,天生就存在大範圍的視覺死角。由於長時間運行、頻繁停靠、與行人及自行車複雜的互動,以及承載大量乘客的責任,這些車輛的事故風險明顯增加。因此,公共運輸業者與車隊管理者面臨越來越大的壓力,需要透過先進駕駛輔助系統(ADAS)提升安全性能與營運效率。
然而,將 ADAS 整合至現有的巴士車隊中鮮少能一帆風順。在實際執行上,營運商經常會遇到數項關鍵挑戰,尤其是在大型化、受法規嚴格驅動的大眾運輸系統中佈署安全技術時更顯困難。
1. 安裝程序複雜且耗費空間
傳統的系統部署依賴多個獨立模組,每個模組都需要各自的佈線、電子控制單元(ECU)及安裝位置。這種破碎化的架構不僅佔用寶貴的車內與底盤空間,更增加了系統干擾或安裝失敗的風險。
2. 供應商與品質管理挑戰
管理涉及多家廠商的破碎化供應鏈,會導致硬體品質參差不齊以及物流管理複雜化。這種多樣性增加了營運難度,且由於技術支援管道分散,進而推高了整體持有成本。
3. 缺乏擴充靈活性
許多傳統 ADAS 系統建立在封閉或專有架構之上,軟體升級能力有限。隨著安全法規的演進和車隊營運需求的改變,若要擴展系統功能(如增加新的 ADAS 功能或升級 AI 演算法),通常需要更換硬體或進行重大的系統重新設計。這種受限的擴充性增加了成本,並限制了車隊營運商的長期適應能力。
4. 影像整合與同步效果不佳
在傳統的多攝像頭配置中,影像串流是由不同模組獨立處理的。若缺乏集中化的系統架構,將難以實現精確的時間同步與無縫的數據融合。這可能導致視覺資訊延遲、錯位或不一致,損害即時狀況感知,並降低 AI 決策的有效性。
5. 影像品質未達最佳化
ADAS 的效能高度依賴影像品質。然而,傳統相機系統在極端光照條件下(如強光眩目、弱光環境,或雨霧等惡劣天氣)表現往往不理想。感測器效能不足與動態範圍受限會降低偵測準確度,直接影響 AI 物體識別、駕駛監控及安全警示的可靠性。
oToGuard:以整合式智慧革新車隊安全
為了應對這些業界共同的挑戰,oToBrite 推出了 oToGuard — 全球首款專為大型商用車輛量身打造的全方位(All-in-one)ADAS 解決方案。oToGuard 搭載了車規級電子控制單元(TI TDA4)、八顆高解析度相機,以及自主研發的視覺 AI 深度學習技術,能針對車輛外部環境與內部座艙提供全面且即時的感測能力。
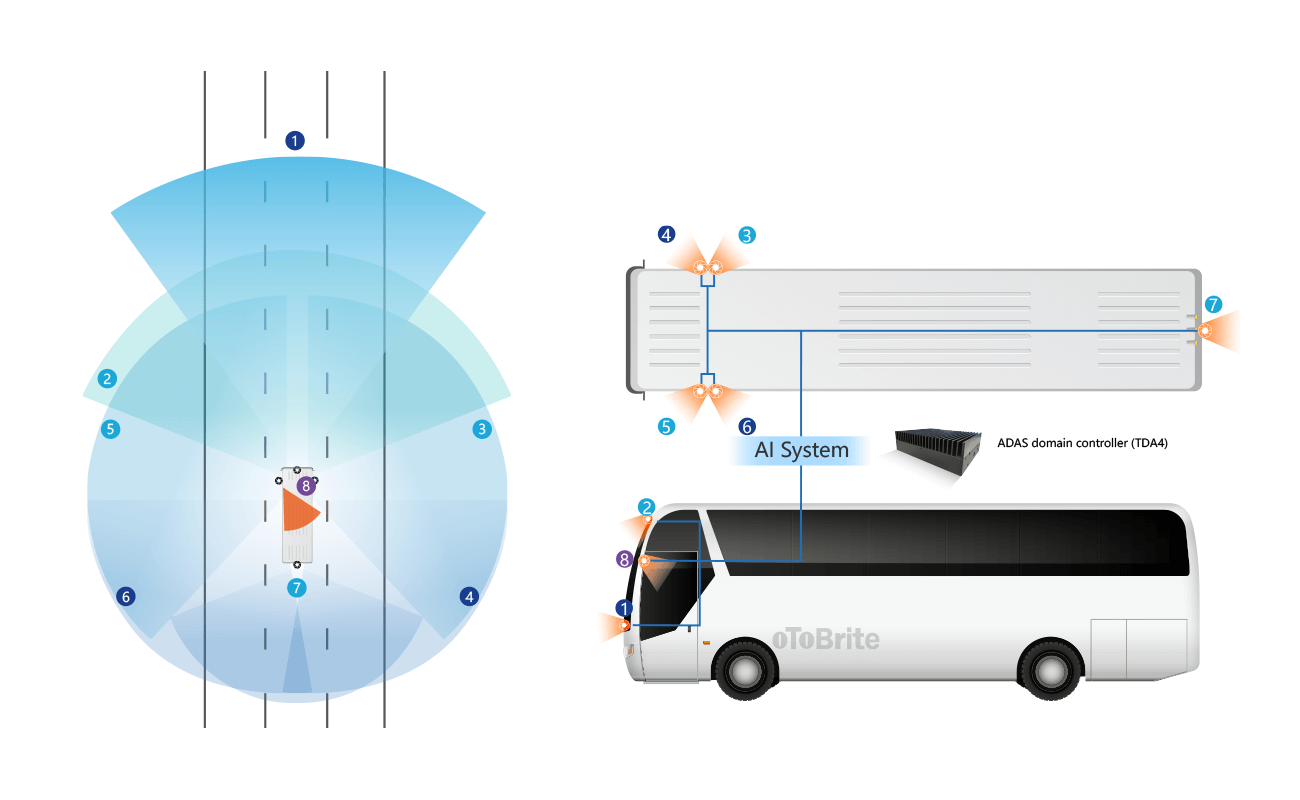
圖 1. 全方位感知架構與 8 個相機配置方案
憑藉強大的視覺 AI 演算法,oToGuard 能精確偵測並分類多種目標物,包括車輛、行人、二輪車、車道線及其他道路元件,藉此支援多項安全與駕駛輔助應用。
透過將多種安全功能整合至單一高效能系統中,oToGuard 憑藉以下核心能力,消除了傳統破碎化配置的限制:
1. 整合式 360° 全景與座艙感測
oToGuard 採用集中式的硬體架構,提供無死角的全面狀況感知:
- 前視鏡頭(2 顆):專為 Level 2+ 前向感知模組設計,支援前方碰撞預警(FCW)、車道偏離警示(LDW,符合 UN R130)以及行人偵測(MOIS,符合 UN R159),偵測距離可達 100 公尺。除了 Level 0 的警告功能外,該架構已準備好支援 UN R79 轉向相關功能(包括 CSF、ESF、ACSF-B1 及 ACSF-C),可在複雜的城市駕駛情境中實現先進的橫向控制。
- 側視鏡頭(4 顆):提供符合 UN R151 規範的雙側盲點偵測(BSIS)保護,偵測範圍內 40 公尺內的弱勢道路使用者(VRU)。除了盲點監控,系統設計亦支援符合 UN R79 (ACSF-C) 的 Level 2+ 變換車道輔助(LCA),為在擁擠交通環境中運行的大型車輛提供更強的橫向感知與主動輔助。
- 後視鏡頭(1 顆):實現後方監控,並與其他畫面整合,提供無縫的環景監控系統(AVM)體驗。
- 座艙內部(1 顆紅外線 IR 鏡頭):透過 3D 臉部特徵點追蹤技術監控車內狀況,可識別超過 100 名駕駛者,並針對各種駕駛行為進行分類管理。

圖 2. 針對不同駕駛情境提供的四種顯示模式
2. 全方位 ADAS 支援(Level 0–2+)
本系統無縫整合了極其廣泛的功能,從 Level 0 警示(包括 AVM 環景、BSD 盲點偵測、DMS 駕駛監控、FCW 前方碰撞預警、LDW 車道偏離警示、MOIS 行人偵測、REIS 後方影像系統),到 Level 2+ 主動輔助(LCA 變換車道輔助、LKA 車道維持輔助)。
憑藉著高精度的車道線偵測技術(誤差值 < 20 公分),即使是在半徑超過 250 公尺的彎道上,oToGuard 仍能確保在複雜駕駛情境中展現可靠的效能。

圖 3. 運作規格與聯合國法規(UN Regulatory)符合性概覽
3. 精準事件錄影
除了主動安全功能外,本系統亦大幅提升了車隊的管理效率。系統內建事件觸發錄影功能,並具備極高的時間同步精準度(誤差 < 3ms),確保所有 8 顆相機的影像串流完全對齊,為精確的事故重建與駕駛行為分析提供可靠依據。
4. 簡化架構以實現快速部署
oToGuard 高度整合的系統架構,讓所有相機影像都能與數位錄影系統(DVR)無縫接軌。此設計顯著降低了佈線的複雜程度,並極小化每輛車所需的相機數量,進而有效降低安裝成本與後續的維護工作量。
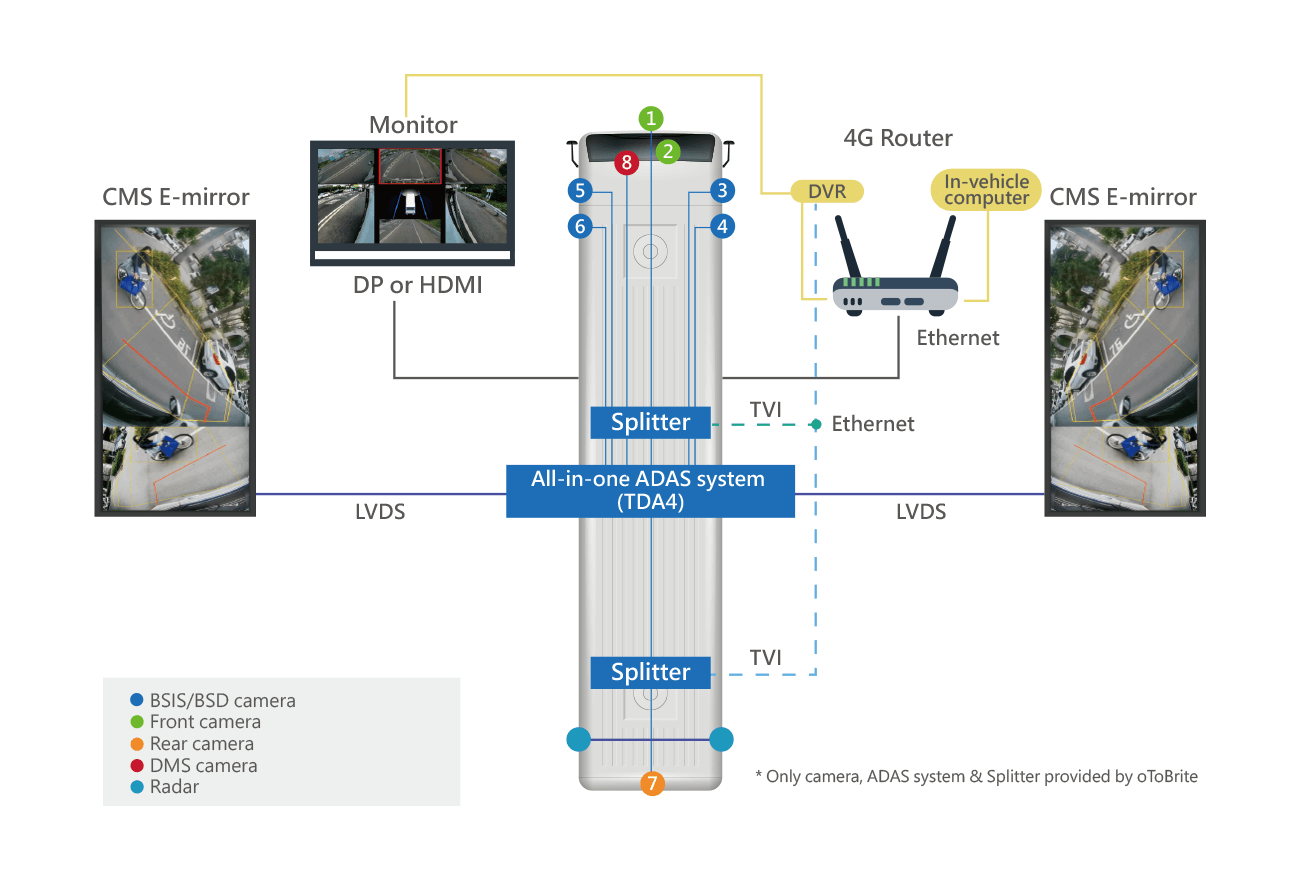
圖 4:oToGuard 系統架構與整合示意圖
5. 先進 AI 駕駛監控
憑藉 3D 臉部特徵點 AI 追蹤技術,oToGuard 可識別多達 100 名駕駛者。系統能精確監控並分類 10 種以上不同的駕駛行為,例如疲勞駕駛、分心、抽菸及使用手機等,從而有效降低因人為疏失所造成的風險。
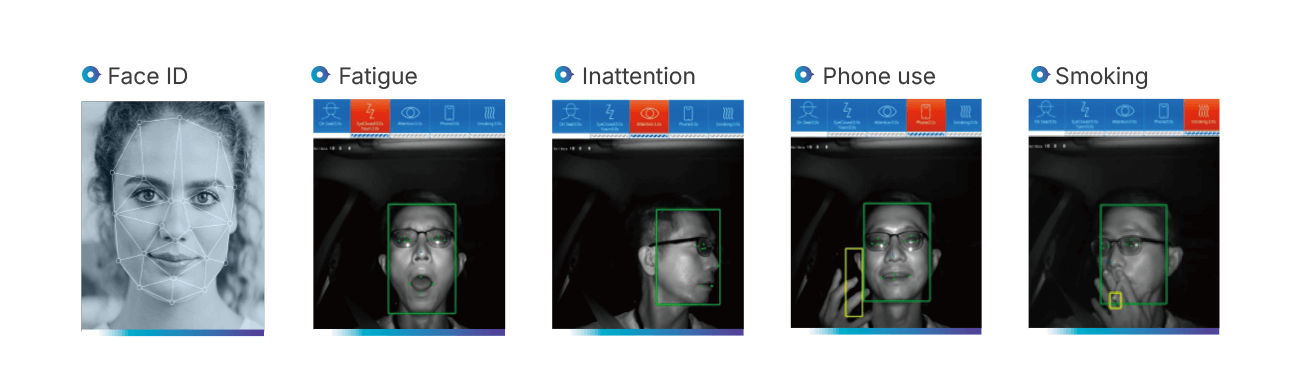
圖 5. 結合 3D 臉部特徵點追蹤與行為分類的駕駛監控系統
6. 符合全球安全法規
oToGuard 專為國際市場部署而設計,並高度聚焦於城市巴士與電動巴士的需求,完全符合針對大型商用車輛制定的關鍵聯合國法規(UN Regulations),包括 UN R130、R151、R158 及 R159。其 Level 2+ ADAS 功能亦滿足 UN R79 轉向設備要求(包含 CSF、ESF、ACSF-B1),確保在複雜的城市交通情境中實現安全且合規的運行。
oToGuard 已在公共運輸領域展現其具備市場導入等級的可靠性,並成功協助三家主要電動巴士製造商取得 UN R130、UN R151 及 UN R79(CSF、ESF、ACSF-B1)等法規的正式型式認證。這一卓越的實績讓 oToGuard 成為全球巴士車隊值得信賴的 ADAS 解決方案,協助營運商達成嚴苛的安全規範,並提升城市交通的安全標準。
7. 優化算力下的高效能 AI
oToGuard 的另一項傑出特色在於其極致的演算法效率。透過先進的模型壓縮與優化技術,歐特明(oToBrite)顯著降低了深度學習所需的運算負載,同時完全不犧牲高精度的辨識率。
傳統系統處理多路 AI 串流通常需要龐大的運算能力,而 oToGuard 的架構僅需 8 TOPS 的算力,即可讓全車 8 個相機模組同時執行 AI 模型。這種高效能確保了高速即時的表現,並帶來更低的功耗,對於能源效率至關重要的電動巴士而言,是極為理想的解決方案。
車隊安全的未來:集中式智慧與實證合規性
隨著法規要求日益嚴苛且車隊營運變得愈加複雜,將傳統零散的解決方案轉向集中式、智慧驅動的架構已勢在必行。oToGuard 正是這一進化的代表,它將 ADAS 從獨立的功能轉變為一個高凝聚力的安全與管理系統。
其結果是提升了狀況感知能力、降低了系統複雜性,並為未來的營運需求做好了全面準備。最終,oToGuard 賦予車隊營運商與原始設備製造商(OEM)超越被動合規的力量,轉而實現主動風險降低與永續安全,為全球更智慧的商用交通奠定基礎。
了解更多資訊請參閱 oToGuard網頁 或 聯絡oToBrite。
原始出處:
本文最初發表於 EE Times,請參閱原文: https://www.eetimes.com/otoguard-integrated-360-camera-system-and-level-2-adas-solution-for-buses-and-trucks/